在線檢測設備精度評定中相關分析方法

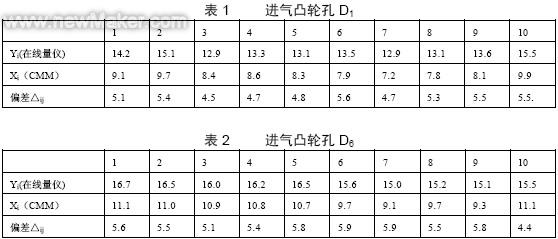
直觀的印象已顯示,任一被測量經兩種設備檢測,所獲得的兩組數據之間存在著相關性。為此需按照上一節提供的思路和建立的方法進行嚴格的計算,然后再采取有針對性的措施。
步驟1,評估被測量j 在兩種儀器上的測得值{x1j,x2j,… ,x10j}與{y1j,y 2j,… ,y10j}之間線性相關的程度。為此,需利用這兩組數據,按上節中的公式(4)求出相關系數r,再根據r 的絕對值大小作出判斷。
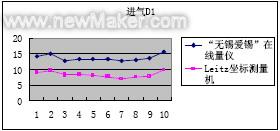
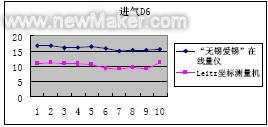
圖1 圖2
步驟2,實踐“修正—補償”措施。用戶首先應根據實際情況,并參照一些已有的標準(指導性技術文件),給精度AC 規定一個指標,例如:本文第二節曾提到AC≤20%·T。對于前述缸蓋的16 個凸輪軸孔Ф0+0.021,可定為AC≤4 μm。而比對測量顯示,多數情況下已超過了這個指標,故有必要采取補償措施。反之,若某個被檢參數j 的“比對”結果表明還不到4 μm,則完全可免去這一步驟。
在表1、表2 的第三行,已寫入了兩個實測值之偏差△ij,接著根據上一節中的公式(5)求出相對被測量j(即表1 中的進氣凸輪孔D1 和表2 中的進氣凸輪孔D6)的修正量△j。然后,將△j,△j+1 等逐個輸入在線檢測設備的計算機控制器中,對這一臺缸蓋多參數綜合測量機來講,由于采用比較測量工作原理,配有一個作為置零用的“標準件”,因此上述修正操作是比較容易的。
為驗證所完成的這一過程的效果,可再抽取若干工件進行比對測量,事實上確也如此做了。圖3、圖4 類似于圖1、圖2,也是兩進氣凸輪孔直徑的比對結果,兩對曲線的吻合程度表明,在證實強相關的前提下,經采取補償措施,精度已大為提高,在線檢測設備相對CMM 的實測值偏差,均控制在2~3 μm 之內。
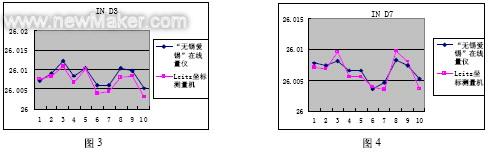
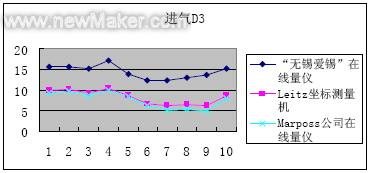
圖5
4.2 底架焊接總成在線檢測方法
這臺檢測設備配置在轎車整車廠車身(拼焊)車間一條焊接自動生產線上,測量的對象是底架焊接總成。完全不同于機加工零部件,焊接總成、沖壓件這一類覆蓋件主要是由自由曲面組成的,被測量均為型面特征點(包括孔的中心)在空間——確切地講是車身坐標系中的位置。此底架焊接總成上共有13 個被測點,都是曲面上的孔心位置,每個點都得用x、y、z 三個坐標來表達,故事實上被檢參數共有39 項。
該在線檢測設備是一套先進的多傳感器視覺測量系統,作為傳感器的光學攝象頭具有大量程、非接觸、快速和較高精度等特點,而且借助某些精密測量儀器,通過采取局部標定和全局標定的方法,可把工件被測點在測量系統中的坐標轉換為在車身坐標系中的坐標,這就大大方便了對底架焊接總成各項被測量的實測結果直接作出評價。
鑒于被測的拼焊總成體積大、剛性差,若將其送到安放大型三坐標測量機的房間中進行比對測量,搬運過程中很易發生變形,從而影響檢測結果的準確性。經考慮,最后決定就在生產現場,采用關節臂坐標測量機PCMM 來實施。相比一般用于沖壓件、焊接件的各種CMM,這種便攜式機種的精度要低些,但由于被測工件各項參數的公差都為±1mm 左右,而且在用PCMM 進行測量時,工件的定位狀態與在線檢測時完全一樣,又消除了一部分產生誤差的因素,因此還是不失為一種既實用也有足夠可信度的方法。
經對13 個測點、39 個空間坐標的比對測量,制成了相應的表和圖,表3 是兩種檢測手段對其中的測點7 的實測數據。
表3 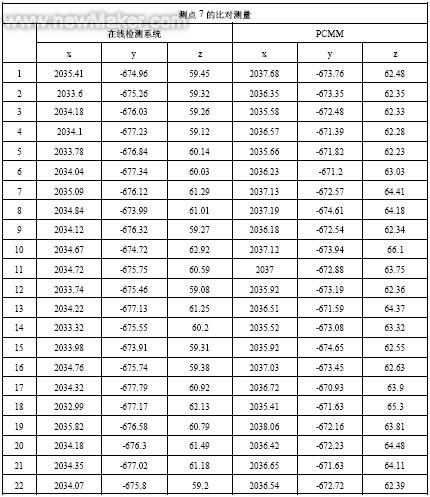
首先,根據表3 中22 個樣本的實測數據,按前面所述相關分析方法,求出工件上點7 的x、y、z 坐標分別由在線檢測系統和PCMM 測得的對應數據之間的相關系數r,以確認其線性相關程度。計算結果為:
r7x =0.935, r7y=-0.950, r7z=0.941
這就說明,兩者之間的相關程度很高。通過對另外12 個測點的比對測量,以及對兩組實測結果的相關分析,獲得了其余36 個相關系數r。全部39 項被測量的線性相關水平如表4 所示。表4 表明,所采用的在線檢測設備與關節臂坐標測量機比對測量的結果為強相關。需要指出的是,在通過局部/全局標定建立測量過程中的車身坐標系時,有幾個測點的Y 坐標方向設置反了,造成對比測量的結果分析呈現負相關,這從圖5 中的曲線圖7—Y—Y 可清楚看出。但在發現后由專業人員予以更正。
當然,在做以上這些工作之前,還是應當根據兩組實測值的比對結果,對在線檢測的實際結果設備各項被測量是否均達到規定精度指標作出評估。底架焊接總成與多數轎車車身覆蓋件相似,其上的39 項被測量的公差為±1mm,精度AC 則要求:AC≤20%·T,實測結果表明。包括測點7 的3 項在內,所有參數均超出了這一范圍,因此,進行上述線性相關分析,并在確認兩種檢測設備的測量結果有可比性,并呈強相關之后再采取相應的修正、補償才是有必要和有價值的。
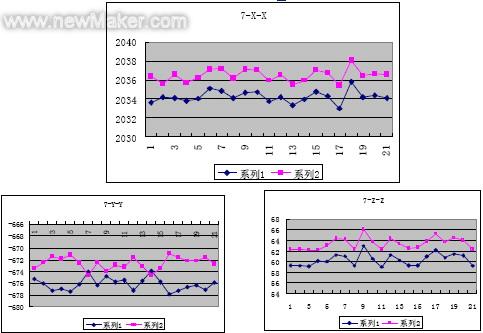
圖6
表4 
們逐個輸入在線檢測設備的控制計算機中,實施對定值系統誤差的補償。然后,通過若干樣本又一次的比對測量予以驗證,結果表明了達到預期的目標。39 項被測參數經在線檢測系統測量,與PCMM 之間的差別在[-0.2mm,+0.2mm]范圍內。
但需要指出的是,設置在車身生產線上的這臺設備在對底架焊接總成進行檢測時所顯現的出的定值系統誤差,與實例1 的情況不同,主要在成因上。從前面分析可知,后者主要是由于兩種測量方法的差別引起的,由于比較單一,故比對測量后的偏差較接近。而造成這套車身在線檢測系統與PCMM 兩者測量結果差別的因素就多些,除測量方法不同是主要原因外,定位誤差也是一個重要因素。實施在線檢測時,工件由二維圓銷和一維削邊銷定位,但因處在生產自動線上,故這一過程不是人為完成,加上由覆蓋件的性質所決定,定位誤差帶來的影響就比實例1 大,當然這里既有“定值”成分,也有“隨機”成分,但結果都造成了兩種檢測設備比對測量的差別在較大范圍內變動。無疑,要從根源上減少甚至消除這些誤差成因是很困難的,特別是那些由被測件自身以及工藝特點所決定的因素。
毫無疑問,在評定一臺檢測設備時采用對比測量并不鮮見,可謂常用方法。但如何科學、合理地對待測得數據,進而采取相應的后續措施改善其精度水平,事實上在過去并未很好解決,正因如此,在線檢測設備中的多參數綜合測量機(儀)的精度評定才被認為是個棘手問題。通過本文前二節的表述和最后兩個實例,說明了以數理統計中的相關分析為基礎,再結合必要的數據處理和修正、補償,能較真實地復現一臺在線檢測設備的精度狀況,為客觀地作出評價提供依據。所推出的這種方法既規范,又有很強的可操作性,無論對設備制造商還是用戶都有價值。
參考文獻
1 羅寧,張玉萍,任柏林. 微機綜合測量系統的誤差因素分析. 工具技術. 1999 No.1
2 朱正德. 在線檢測設備評定方法的建立與實踐. 計量技術. 2001,No.10
3 朱正德. 機械加工設備能力的評定指標——機器能力指數 . 汽車標準化,2002 No.1
4 陳功振. 定值系統誤差的判斷及消除方法. 計量技術. 2002,No.8(end)

評論