源來如此 | 使用數字控制器在次級側實現 LLC 電流模式控制

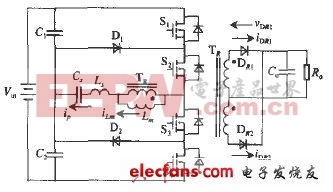
如圖 1 所示,指示器 - 指示器 - 電容器 (LLC) 串行諧振電路可以在初級側實現零電壓開關,在次級側實現零電流開關,從而提高效率并實現更高的開關頻率。通常,LLC 轉換器采用直接頻率控制模式,只有一個電壓環路,可通過調整開關頻率來穩定其輸出電壓。直接頻率控制 LLC 無法實現高帶寬,因為 LLC 微小信號傳輸功能存在雙極點,在不同的負載條件下會發生變化。當將所有邊界條件納入考慮時,用于直接頻率控制的 LLC 補償器設計將變得棘手且復雜。
電流模式控制可以通過內部控制環路消除雙極點,同時使用簡單的補償器在所有運行條件下實現高帶寬。混合滯環控制是一種 LLC 電流模式控制方法,它結合了電荷控制和斜率補償技術。這種控制方法在保留電荷控制優異瞬態性能的同時,通過引入斜率補償技術,有效規避了空載或輕載狀況下的相關穩定性問題。德州儀器 (TI) 提供的 UCC256404 LLC 諧振控制器證明了該方法切實可行。

圖 1:LLC 串行諧振電路可在初級側實現零電壓開關,并在次級側實現零電流開關。
LLC 電流模式控制的原理
與降壓和升壓等脈寬調制 (PWM) 轉換器類似,峰值電流模式控制可在每個開關周期內直接調控電感電流,從而將內環控制系統簡化為一階系統。
在 LLC 轉換器中,諧振回路的工作方式類似于擺動。高低側開關對諧振電容器電壓進行推挽操作:當高側開關導通,且諧振電流轉為正值后,諧振電容電壓將向上擺動;反之,當低側開關導通,且諧振電流轉為負值后,諧振電容電壓將向下擺動。
當高側開關導通時,能量流入諧振轉換器。如果移除輸入去耦合電容器,則向諧振回路提供的功率等于輸入電壓和輸入電流的乘積的積分值。若忽略死區時間,則公式 1 可表示每個開關周期內的能量。

公式 1
在公式 1 中,輸入電壓是恒定的,輸入電流等于諧振電流的絕對值。因此您可以將公式 1 修改為公式 2。

公式 2
觀察諧振電容器,諧振電流的積分值與諧振電容器上的電壓變化成正比(公式 3)。

公式 3
公式 4 可推導出傳輸到諧振回路的能量。

公式 4
從公式 4 可以明顯看出,每個開關周期內傳遞的能量與高側開關導通時諧振電容的電壓變化量成正比。這與降壓或升壓轉換器中的峰值電流控制非常相似,其中能量與指示器的峰值電流成正比。
LLC 電流模式控制通過控制諧振電容器上的電壓變化來控制每個開關周期中提供的能量,如圖 2 所示。

圖 2:這種通過控制諧振電容器電壓變化來管理每個開關周期傳輸能量的方式,正是 LLC 電流模式控制的原理。
使用 MCU 實現 LLC 電流模式控制
圖 3 展示了基于德州儀器 (TI) TMS320F280039C C2000? 32 位微控制器 (MCU) 實現的電流模式 LLC 邏輯,該方案包含基于硬件的諧振電容器電壓變化量 (ΔVCR) 比較、脈沖生成和最大周期限制 。
在 LLC 電流模式控制中,信號 Vc 來自電壓循環補償器,信號 VCR 是諧振電容器的電壓感應。C2000 比較器子系統模塊具有內部斜率發生器,該發生器可自動為 Vc 提供下降斜率補償。您只需設置斜率發生器的初始值;模數轉換器 (DAC) 將根據斜率設置提供下降斜率 VCR 限制 (Vc_ramp)。比較器子系統模塊將 VCR 的模擬信號與斜率限制進行比較,并生成觸發事件 (COMPARE_EVT) 以通過 ePWM X-Bar 觸發增強型 PWM (ePWM)。
ePWM 中的動作限定器子模塊接收來自比較器子系統的比較事件,并在每個開關周期中將 PWM (PWMH) 的高側拉低。在 PWMH 變為低電平后,可配置邏輯塊會將相同的脈沖寬度復制到 PWM (PWML) 的低側。PWML 變為低電平后,可配置邏輯塊 (CLB) 將生成同步脈沖,用于復位所有相關模塊并將 PWMH 信號重新置于高電平。該過程會按照新的開關周期重復。
除了比較動作之外,時間基值子模塊還限制了 PWMH 和 PWML 的最大脈沖寬度,這兩個脈沖寬度決定了 LLC 轉換器的最小開關頻率。如果計時器計數至最大值時仍未出現比較事件,時間基值子模塊將復位 AQ 子模塊并拉低 PWMH,以此替代比較器子系統模塊的比較事件動作。
這個硬件邏輯構成內部 VCR 變化控制,該硬件邏輯可控制在每個開關周期中傳送到諧振回路的能量。隨后,可采用傳統中斷服務例程設計外部電壓循環補償器,通過計算并刷新 VCR 變化振幅至 Vc 的設定值來實現控制。

圖 3:采用 C2000 MCU 的 LLC 電流模式控制邏輯,其中信號 Vc 來自電壓循環補償器,信號 VCR 是諧振電容器的電壓感應。
實驗結果
我在使用 TMS320F280039C MCU 的 1kW 半橋 LLC 平臺上測試了此處所述的電流模式控制方法。圖 4 顯示了 400V 輸入和 42A 負載下的電壓循環波德圖,證明 LLC 可以實現 6kHz 帶寬和 50 度的相位裕度。

圖 4:具有 400V 輸入和 42A 負載的電流模式控制 LLC 的波德圖。
圖 5 比較了對輸入電壓 400V,負載電流 10A 至 80A(轉換速率為 2.5A/μs)的瞬態狀況下,直接頻率控制與混合滯環控制的負載瞬態特性。如您所見,與傳統的直接頻率控制 LLC 相比,混合滯環控制電流模式控制方法可以更好地響應負載瞬態。

圖 5:直接頻率控制 (a) 與混合滯環控制 (b) 在 400VDC 輸入,電流 10A 至 80A(轉換率 2.5A/μs)情況下的負載瞬態。綠色是主要電流;淺藍色是 DC 耦合的輸出電壓;紫色是 AC 耦合的輸出電壓;深藍色是輸出電流。
數字電流模式控制 LLC
較之直接頻率控制,數字電流模式控制的 LLC 可實現更高控制帶寬,并在負載切換期間保持極低的電壓波動。在 N+1 冗余和并聯應用中,這種控制方法可以在熱插拔或提供保護期間將總線電壓保持在穩壓范圍內。因此,這種控制方法憑借其快速響應特性和數字可編程能力,已在數據中心電源和 AI 服務器電源領域獲得廣泛應用。


評論