傳感器融合的力量

長期以來,工業(yè)機器一直依賴各種傳感器來執(zhí)行其目標任務(wù)并獲得所需的性能和可靠性。傳感器融合提供了一種更全面的方法來實現(xiàn)這些結(jié)果,并在這些應(yīng)用和其他應(yīng)用中做出適當?shù)臎Q策,并提供其他好處。實際上,傳感器融合是數(shù)據(jù)融合的一個子類別,也稱為多感官數(shù)據(jù)融合或傳感器-數(shù)據(jù)融合。
在人工智能領(lǐng)域,傳感器融合,以及大型語言模型、神經(jīng)網(wǎng)絡(luò)和機器學(xué)習(xí),以及高帶寬內(nèi)存(HBM)等其他使能技術(shù)繼續(xù)快速發(fā)展。隨著這些技術(shù)的每一次進步,可以更好地利用單個傳感器類型的固有優(yōu)勢,并克服或至少避免其弱點。例如,在機器感知方面,激光雷達可以準確檢測物體,但它不具備攝像頭或雷達傳感的范圍或經(jīng)濟性。相機很容易被灰塵、陽光、雨、雪或黑暗弄瞎。雷達無法讀取標志或觀察不同顏色的光。
傳感器融合的各種設(shè)計方法包括:
中心化與去中心化
不同級別的抽象
不同的融合級別
傳感器融合范式(統(tǒng)計、概率或基于知識)
融合時間(晚或早)
傳感器融合對自主機器的好處
在自主機器中,傳感器融合在動態(tài)環(huán)境中提供冗余、更高的準確性、更好的分辨率和魯棒性。然而,添加更多傳感器意味著添加更多必須實時適當管理的數(shù)據(jù)。這需要合適的軟件將傳感器的輸出融合在一起。

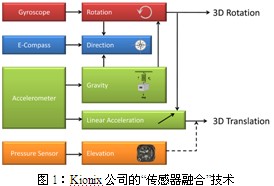
圖 1.傳感器的正確選擇必須伴隨著軟件的正確選擇,才能實現(xiàn)傳感器融合的承諾優(yōu)勢。(圖片:傳感器融合)
通過正確設(shè)計/選擇信號處理算法,可以最大限度地減少單個傳感器的噪聲、錯誤數(shù)據(jù)和其他不確定性。此外,還可以實現(xiàn)傳感器輸入的容錯。通過觀察一個傳感器的輸出與其他傳感器的輸出不一致來識別傳感器故障,為使用傳感器融合提供了額外的優(yōu)勢和理由。
實際用例
通過傳感器融合,一些現(xiàn)代用例要么變得實用,要么得到大幅改進。示例包括自動駕駛汽車、機器人、無人機等。
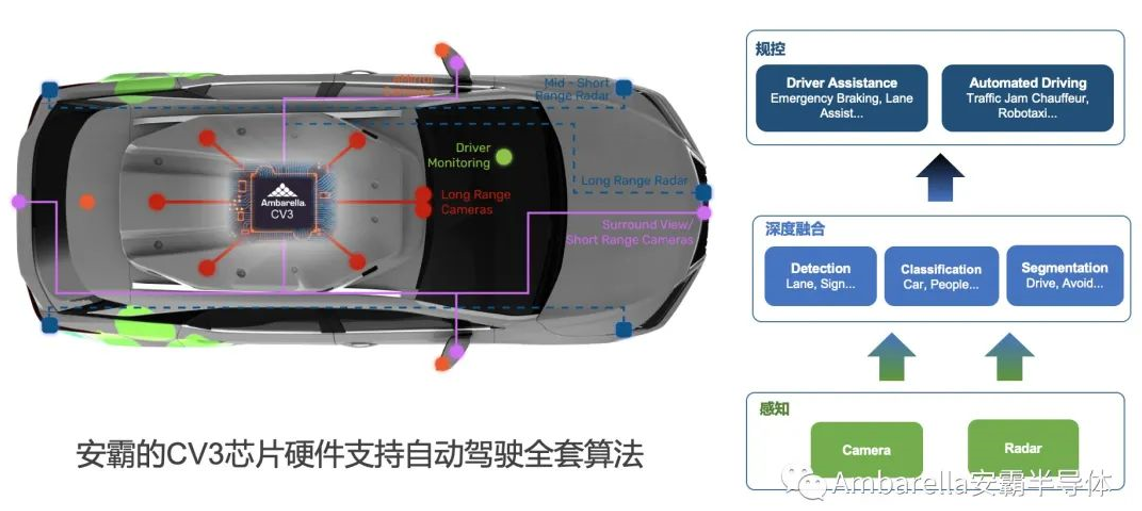
例如,在自動駕駛汽車中,激光雷達、雷達和光學(xué)傳感(攝像頭)的傳感器融合是其發(fā)展中最重要的三種傳感器技術(shù)。實施它們的最終目標是重現(xiàn)人類可靠判斷的能力,能夠根據(jù)傳感器的信息和從以前的經(jīng)驗中吸取的教訓(xùn)來做出瞬間決策。
在全電動捷豹 I-Pace SUV 中,每個可見的安裝位置都有多個傳感器。為了始終如一地獲得所需信息量,Waymo 工程師得出結(jié)論,單一類型的傳感器無法在所有作條件下提供足夠的細節(jié)。
自主移動機器人、固定機器人、空中機器人和海洋機器人都使用傳感器融合。對于機器人作,精確的三維輸入使機器人能夠動態(tài)適應(yīng)不斷變化的條件。高分辨率測繪對于機器人系統(tǒng)的安全高效移動至關(guān)重要,特別是在協(xié)作機器人(在人類附近作甚至與人類交互的協(xié)作機器人)情況下,以降低碰撞風(fēng)險并優(yōu)化工作流程效率。
雖然單個無人機可以使用傳感器融合,但當該技術(shù)用于創(chuàng)建使用大量空中無人機作為協(xié)調(diào)、智能的集體而不是單個單位發(fā)揮作用時,該技術(shù)會變得更加令人印象深刻。



評論