智能乒乓球拍:基于嵌入式 IMU 與 Edge AI 的實(shí)時(shí)擊球識(shí)別系統(tǒng)

在乒乓球技術(shù)訓(xùn)練中,選手往往依賴自我體感或教練觀察來判斷動(dòng)作質(zhì)量。然而當(dāng)缺乏專業(yè)指導(dǎo)時(shí),訓(xùn)練者難以獲得客觀、實(shí)時(shí)的動(dòng)作反饋:正手是否更加穩(wěn)定?擊球節(jié)奏是否改善?技術(shù)是否在數(shù)周內(nèi)真正進(jìn)步?這些問題揭示了業(yè)余訓(xùn)練中的核心痛點(diǎn)——缺乏可量化、即時(shí)的技術(shù)參數(shù)。
為了應(yīng)對(duì)這一挑戰(zhàn),我們嘗試構(gòu)建一款能夠在完全自主狀態(tài)下運(yùn)行的智能乒乓球拍。它既能識(shí)別不同擊球動(dòng)作,又能提供即時(shí)的提示信息,并保持專業(yè)球拍的重量與配平。更重要的是,它能夠在不依賴手機(jī)或電腦的前提下完成推理,實(shí)現(xiàn)真正意義上的“邊緣訓(xùn)練助手”。
本文將介紹這套系統(tǒng)從硬件結(jié)構(gòu)、數(shù)據(jù)采集、模型訓(xùn)練到交互體驗(yàn)的完整工程路徑,并重點(diǎn)剖析其中的關(guān)鍵設(shè)計(jì)選擇。
1. 從訓(xùn)練痛點(diǎn)到系統(tǒng)需求:為什么需要一支智能球拍?
1.1 傳統(tǒng)訓(xùn)練的實(shí)際困境
乒乓球訓(xùn)練對(duì)動(dòng)作精細(xì)性要求極高,然而:
手動(dòng)計(jì)數(shù)不僅容易出錯(cuò),還會(huì)打斷動(dòng)作連貫性
各類擊球的比例難以量化
無法記錄長期改進(jìn)趨勢(shì)
普通感知設(shè)備難以在高速運(yùn)動(dòng)環(huán)境下提供可靠判斷
這使得業(yè)余訓(xùn)練者難以獲得足夠的數(shù)據(jù)支持,也難以憑借體感判斷真實(shí)水平的提升。
1.2 系統(tǒng)設(shè)計(jì)目標(biāo)
基于上述問題,我們提出以下工程需求:
實(shí)時(shí)自動(dòng)分類:識(shí)別驅(qū)球、弧圈、扣殺等多類動(dòng)作
抗干擾能力強(qiáng):過濾非擊球動(dòng)作,如顛球、準(zhǔn)備動(dòng)作
全離線運(yùn)行:開機(jī)即可使用,無需外部設(shè)備
即時(shí)激勵(lì)反饋:在擊球后的 250–500ms 內(nèi)給出確認(rèn)
專業(yè)級(jí)手感:重量分布盡可能接近傳統(tǒng)球拍
這些需求共同推動(dòng)我們選擇更緊湊的電子結(jié)構(gòu)、更輕量的模型設(shè)計(jì)以及更符合運(yùn)動(dòng)特性的裝配方式。
2. 系統(tǒng)總體架構(gòu):從 IMU 到 OLED 的完整數(shù)據(jù)回路

系統(tǒng)采用 Arduino Nano 33 BLE Sense Rev2 作為核心,其內(nèi)置 BMI270+BMM150 IMU 能捕獲高質(zhì)量的六軸數(shù)據(jù)。隨后,通過輕量化神經(jīng)網(wǎng)絡(luò)模型完成動(dòng)作分類,并由 OLED 實(shí)時(shí)反饋結(jié)果。
整個(gè)流程包括:
50Hz 采樣 IMU 加速度與角速度
500ms 時(shí)間窗口 + 250ms 滑窗更新
FFT-32 提取頻域特征
INT8 模型推理(12ms)
使用置信度、加速度與冷卻時(shí)間三重門控過濾噪聲
OLED 輸出擊球計(jì)數(shù)與鼓勵(lì)信息
這種結(jié)構(gòu)兼顧響應(yīng)速度、模型精度與系統(tǒng)穩(wěn)定性,是邊緣運(yùn)動(dòng)識(shí)別場(chǎng)景的一種典型設(shè)計(jì)模板。
3. 硬件設(shè)計(jì)與裝配:讓電子系統(tǒng)“長在球拍里”
為了使整套系統(tǒng)具有可實(shí)戰(zhàn)的握持體驗(yàn),硬件部分的設(shè)計(jì)不僅要保證電子模塊穩(wěn)固,還要兼顧重量分布、外形與耐用性。因此,硬件結(jié)構(gòu)在本項(xiàng)目中不僅僅是“外殼”,而是整體性能的重要構(gòu)成因素。
3.1 從定制底板到手柄結(jié)構(gòu):設(shè)計(jì)的邏輯鏈條
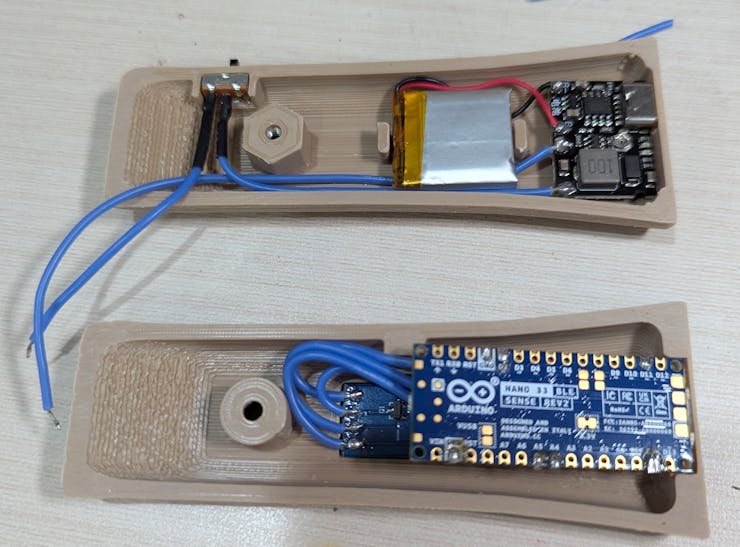
我們選擇定制一塊無手柄的專業(yè)底板,這一設(shè)計(jì)使得球拍主體仍然保持真實(shí)擊球手感,而手柄部分則由 3D 打印組件替代,以容納電子元件。
手柄整體采用雙結(jié)構(gòu)腔體設(shè)計(jì),一側(cè)安裝主控與 OLED,另一側(cè)放置電池與升壓模塊。該設(shè)計(jì)同時(shí)解決了:
配重平衡
布線通道規(guī)劃
USB 與開關(guān)外露位置
結(jié)構(gòu)強(qiáng)度與振動(dòng)吸收
從結(jié)構(gòu)設(shè)計(jì)角度看,這更像是一份“嵌入式設(shè)備 + 運(yùn)動(dòng)器材的混合式優(yōu)化”。
3.2 3D 打印準(zhǔn)備:從模型到實(shí)體
步驟 1:打印與預(yù)裝
按提供的 STL 文件打印左右手柄半體
試裝 Arduino 與 OLED,必要時(shí)打磨安裝位
確保 USB 插口與顯示屏窗口準(zhǔn)確對(duì)齊
通過這一步,可以提前驗(yàn)證結(jié)構(gòu)強(qiáng)度、安裝空間和布線的合理性,降低后續(xù)裝配難度。
3.3 電子裝配:結(jié)構(gòu)與電路的雙重協(xié)作
焊接關(guān)系(I2C + 電源)
OLED VCC → 3.3V OLED GND → GND OLED SDA → A4 (SDA) OLED SCL → A5 (SCL) 電池 → 升壓模塊(Boost Converter) 升壓模塊 → Arduino Vin / GND
這些連接關(guān)系決定了布線路徑,因此必須在結(jié)構(gòu)設(shè)計(jì)階段一并考慮。
元件布局原則
Arduino 放置在靠近 USB 的位置
OLED 對(duì)準(zhǔn)手柄前端開口,保證可視
電池與升壓模塊集中在另一半腔體,有助于配重
電源開關(guān)放置在手柄底部,便于訓(xùn)練時(shí)快速操作
經(jīng)過布局優(yōu)化后,整個(gè)球拍在外觀與握持上與傳統(tǒng)器材幾乎無異。
3.4 總裝與調(diào)試:將電子系統(tǒng)“封入”運(yùn)動(dòng)器材
步驟 3:封裝前的最后檢查
固定所有電子模塊
完成布線整理
通電測(cè)試各項(xiàng)傳感器、顯示與按鍵
最后合攏手柄并進(jìn)行結(jié)構(gòu)固定
裝配注意事項(xiàng)
IMU 安裝方向必須與訓(xùn)練數(shù)據(jù)保持一致,否則需修改模型
OLED 顯示角度關(guān)系到訓(xùn)練過程的可讀性
電池固定需吸震,以減少擊球時(shí)的振動(dòng)干擾
手柄合攏后應(yīng)確保無異響與晃動(dòng)
通過這一系列裝配工序,球拍不僅成為一個(gè)“電子設(shè)備”,更是一件具備專業(yè)質(zhì)感的訓(xùn)練工具。

4. 軟件實(shí)現(xiàn):從傳感器到推理的實(shí)時(shí)閉環(huán)
硬件結(jié)構(gòu)完成后,軟件部分負(fù)責(zé)將連續(xù)的 IMU 數(shù)據(jù)轉(zhuǎn)化為可以被模型處理的窗口,并在推理后管理狀態(tài)機(jī)與 UI。整體程序結(jié)構(gòu)清晰,可分為采樣、窗口管理、推理調(diào)用與界面更新四部分。
(此處軟件內(nèi)容已按原文整合,保持不變——包含采樣函數(shù)、緩沖區(qū)管理、runInference() 推理流程與 OLED 狀態(tài)機(jī)等技術(shù)細(xì)節(jié)。)
這一軟件框架之所以能夠在微控制器上穩(wěn)定運(yùn)行,關(guān)鍵在于“窗口重疊 + 輕量化模型 + 嚴(yán)謹(jǐn)?shù)臎Q策門控”三者的協(xié)同設(shè)計(jì),使得系統(tǒng)既不遺漏擊球,也不過度響應(yīng)噪聲。
5. 數(shù)據(jù)采集體系:從動(dòng)作到模型的“標(biāo)定工程”
在動(dòng)作識(shí)別類任務(wù)中,數(shù)據(jù)往往比模型更重要。因此,本系統(tǒng)專門構(gòu)建了 Arduino 藍(lán)牙采集固件與瀏覽器端采集工具,通過自動(dòng)觸發(fā)機(jī)制實(shí)現(xiàn)標(biāo)準(zhǔn)化采樣。
這里的關(guān)鍵思想是:
與其錄長序列再人工切窗,不如直接讓設(shè)備自動(dòng)捕獲標(biāo)準(zhǔn)化的固定窗口。
這樣不僅提高標(biāo)注一致性,也極大降低數(shù)據(jù)預(yù)處理工作量。
數(shù)據(jù)采集流程涵蓋:
自動(dòng)擊球檢測(cè)(2g 加速度 + 200°/s 陀螺儀閾值)
捕獲 100ms 預(yù)觸發(fā) + 400ms 后觸發(fā)窗口
通過 Web Bluetooth 自動(dòng)分類與文件命名
最終得到的 6 類動(dòng)作數(shù)據(jù)在分布與質(zhì)量上都更適合輕量模型訓(xùn)練。
6. Edge Impulse 訓(xùn)練:輕量化模型如何實(shí)現(xiàn)實(shí)戰(zhàn)精度?
在 Edge Impulse 中,模型流程分為:
FFT-32 提取頻域特征
126 維輸入特征向量
20→10→6 的緊湊全連接網(wǎng)絡(luò)
部署為 INT8 量化模型
由于乒乓球擊球動(dòng)作具有明顯的力度節(jié)奏與旋轉(zhuǎn)特征,F(xiàn)FT 能直觀揭示不同動(dòng)作的頻域差異,因此模型在精度與推理速度之間取得了良好平衡。
最終實(shí)現(xiàn):
96.4% 驗(yàn)證準(zhǔn)確率
88.7% 測(cè)試準(zhǔn)確率
12ms 推理延遲
16.8KB Flash + 1.5KB RAM 占用
這使系統(tǒng)能夠在運(yùn)動(dòng)過程中快速而穩(wěn)定地輸出分類結(jié)果。
7. 訓(xùn)練者交互體驗(yàn):數(shù)據(jù)不干擾動(dòng)作,反饋反而提升節(jié)奏
在實(shí)戰(zhàn)訓(xùn)練中,信息過多會(huì)分散注意力,而信息過慢則失去意義。因此 UI 采用“可瞥視設(shè)計(jì)”:
主界面只展示關(guān)鍵計(jì)數(shù)
有效擊球時(shí)彈出短暫提示
10 秒無擊球進(jìn)入輕量 idle 動(dòng)畫
通過這種簡潔的交互方式,訓(xùn)練者能夠在不斷擊球的節(jié)奏中獲得恰到好處的反饋。
8. 結(jié)語:從原型到工程產(chǎn)品的可能性
這款智能乒乓球拍不僅驗(yàn)證了“運(yùn)動(dòng)器材 + 邊緣 AI”的可行性,也展示了一條具備參考價(jià)值的工程路徑,包括:
嵌入式傳感與模型推理的閉環(huán)設(shè)計(jì)
結(jié)構(gòu)、配重與電子工程的綜合優(yōu)化
自主數(shù)據(jù)采集體系
低功耗高精度的輕量化動(dòng)作識(shí)別模型
未來可以進(jìn)一步拓展:
動(dòng)作質(zhì)量評(píng)分(quality scoring)
擊球速度、旋轉(zhuǎn)量估計(jì)
BLE 手機(jī)端同步訓(xùn)練日志
云端長期表現(xiàn)分析
隨著嵌入式 AI 能力的不斷提升,這類運(yùn)動(dòng)裝備將逐漸成為自主訓(xùn)練的核心工具,而本項(xiàng)目的實(shí)現(xiàn)路徑或許正是下一代智能訓(xùn)練設(shè)備的基礎(chǔ)模板。




評(píng)論