DIY 3D-打印 String Shooter —— 深度技術解析與電機/摩擦/電路的工程原理





本節將從以下五大工程角度進行深入解析:
1. 動力系統與電機控制深度原理
2. 摩擦驅動與能量傳遞的理論分析(Friction + Normal Force)
3. 線圈加速度模型與發射動能評估
4. 電路結構、負載分析、保護與穩定性設計
5. 系統瓶頸、優化方向與高級改進建議
1. 動力系統深度解析:雙直流電機驅動的動力學基礎
1.1 使用 130 直流電機的原因
該項目采用 Micro 130 DC Motor,其特點如下:
參數 | 典型值 |
工作電壓 | 3–6V(使用單節 3.7V 鋰電池非常適合) |
空載轉速 | 11000–15000 rpm |
空載電流 | 60–100 mA |
啟動電流(Locked-rotor) | 0.7–1.2 A(瞬間) |
為什么要用兩個電機?
→ 因為線圈需要夾在兩個滾輪之間。如果只用單電機驅動一個滾輪,另一側摩擦不穩定,會造成滑移、發射不均勻。因此:
? 雙輪同向高速旋轉
? 對線形成夾持張力
? 最大化摩擦力與能量傳遞效率
1.2 雙電機并聯驅動的電流消耗與供電穩定性
兩個電機是 并聯 連接,因此:
工作電流約為:
0.2A(典型) + 啟動峰值約 1.5–2A
因此要求:
· 電池需有 ≥2A 放電能力(大部分 18650 或 LiPo 都可以)
· TP4056 不直接驅動電機,而是給電池充電
(如果電機直接從 TP4056 取電會引起欠壓關斷)
2. 摩擦驅動原理(核心科學原理)
2.1 摩擦力是發射的核心動力
滾輪對線圈的作用依賴于 摩擦剪切力 (F_friction)
公式如下:
F = μ · N
其中:
· μ = 摩擦系數(PLA 對棉線約 0.3–0.5)
· N = 垂直夾緊力(來自兩個滾輪對線的擠壓力)
· F = 實際可提供的驅動力
要提高發射速度 → 提高 F_friction
可從三個方向優化:
方法一:增大摩擦系數 μ
例如:
· 在滾輪外包覆橡膠 O-ring
· 使用 TPU 打印滾輪
· 使用噴砂或高摩擦紋路
方法二:提高垂直壓力 N
可通過以下方式優化 N:
· 縮小滾輪間隙使線被夾緊
· 增加滾輪直徑提高卷入角
· 使用彈簧機構讓輪子自動貼合(高級改進)
方法三:提高滾輪轉速(提高接觸線速度 v)
直流電機提供了約 10–15k rpm,因此線速度可達:
v ≈ π × D × RPM
如果滾輪直徑 D = 20 mm:
v ≈ 3.14 × 0.02 × 15000 ≈ 942 m/min
約等于 15.7 m/s
理論上線圈可以獲得數十 km/h 的瞬時速度(空氣阻力影響較小)。
3. 發射動力學模型(加速度分析)
線圈通過滾輪時被摩擦力拉動,因此加速度來自:
a = F_friction / m
假設線圈質量 m = 1 g(0.001 kg)
摩擦力 F = 0.5 N(常見值)
則:
a = 0.5 / 0.001 = 500 m/s2
(約為 50 g,加速度非常可觀)
如果加速距離為滾輪接觸長度 L ≈ 20 mm:
v2 = 2 a L
v2 = 2 × 500 × 0.02 = 20
v ≈ 4.47 m/s(為最低速度估算)
實際速度會更高,因為線圈內部仍保持張力并持續被拉動。
4. 電路圖與系統電氣行為深度解析


以下為項目的典型電路架構(邏輯示意):
USB-C
│
[TP4056 Module]─── Battery ─── SPST Switch ─── Motors (Parallel)
│
CHRG / DONE Indicators
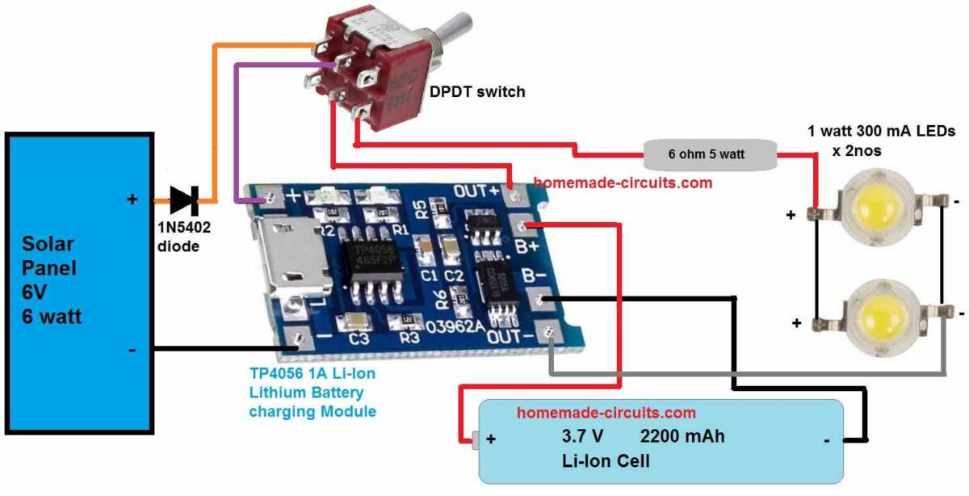
4.1 TP4056 在系統中的作用
TP4056 提供:
1. 充電控制:最大 1A USB-C 輸入
2. 過充保護(帶保護版)
3. 電池管理(自動恒流、恒壓充電)
重要特性:
· TP4056 輸出不能直接驅動電機(瞬間電流太大)
· 電機必須從電池取電
· TP4056 在充電時,電機仍能工作(電池旁路供電)
4.2 電流分析(關鍵工程參數)
假設每個電機工作電流:
· 典型:0.2 A
· 峰值:1.0 A
兩個電機并聯 → 峰值可能達:
2.0 A(需要粗線 + 焊接可靠)
因此:
建議的導線規格:
· 22 AWG(普通供電)
· 若長時間高載:20 AWG
4.3 電路穩定性問題與解決
可能出現:
問題 1:電機開機瞬間導致電池電壓掉落
→ TP4056 會錯誤地認為電池欠壓
解決:加 1000 μF 電解電容并聯在電池兩端
問題 2:電機反電動勢 (Back EMF) 干擾
DC motor 關斷瞬間會產生反向脈沖電壓,需要抑制:
解決:
· 在電機兩端并聯 1N4148 或 SS14 二極管
· 或加入 0.1 μF 陶瓷電容(電機降噪)
5. 系統瓶頸與可行的高級優化
5.1 性能瓶頸
類別 | 限制因素 |
動力 | 電機轉速有限、摩擦系數不足 |
穩定性 | 無法實時控制轉速(全開/全關) |
結構 | 滾輪對線的張力不能自動適應 |
材料 | PLA 摩擦面磨損快 |
5.2 工程級優化方案(Industrial-grade)
1. 加入彈簧結構,讓兩個滾輪自動壓緊線圈
→ 自適應不同直徑線圈
→ 摩擦力更均勻
2. 改用橡膠覆蓋滾輪
摩擦力提升 2–3 倍
→ 發射速度顯著提升
3. 加入 PWM 驅動(使用 MOSFET + 單片機)
可調節轉速,比如 50%、75%、100%。
速度控制器結構:
Battery → MOSFET → Motors
MOSFET Gate ← PWM (Arduino / ATtiny)
4. 使用金屬軸承代替塑料孔
減少摩擦、提高壽命
5. 升級電機到 370 或 180 高速電機
速度可提升到原來的 2–3 倍
原項目鏈接:
https://www.hackster.io/NEXTBUILDER/diy-string-shooter-c51526
最終總結
本項目不僅是一個可玩的 3D 打印裝置,它同時具備:
· 摩擦學
· 電機控制
· 能量傳遞動力學
· 電子與電池管理
· 結構力學
等多領域的完整工程案例。
通過深化分析可以看到,這個小巧的 String Shooter 本質上是一個 高速摩擦驅動傳動系統,具有很強的教學價值和工程擴展空間。








評論