體感遙控器設計遭遇瓶頸?用STM32 MCU造!


2 硬件電路設計
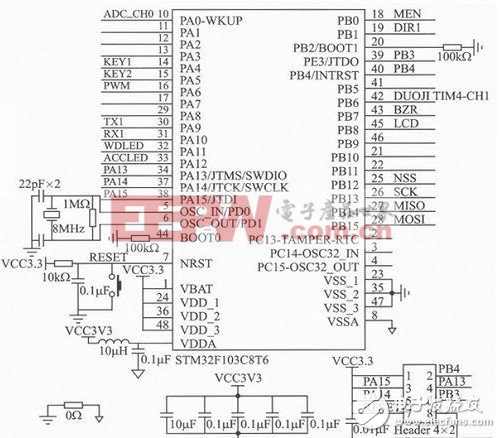
2.1 主控制模塊電路
主控制器STM32F103C8T6芯片,工作頻率高達72 MHz,內置64 KB的Flash和20 KB的SRAM,具有豐富外設和超低功耗,完全滿足本設計要求。主控制模塊電路圖如圖3所示,參照ST公司發布的STMF10xxx硬件開發入門文檔,該部分包括外部時鐘電路、模擬電源輸入、電源濾波、下載仿真口的設計。
2.2 電源模塊電路
本遙控器采用8.4 V鋰電池供電,采用TL750M05C穩壓芯片提供5 V電壓,選用REG1117-3.3穩壓芯片為系統提供3.3 V電壓。STM32F1 03C8T6電源分為模擬電源與數字電源,為了保證其正常工作,將兩路電源進行隔離設計,在模擬地與數字地之間通過0Ω電阻實現單點共地。為監測鋰電池電源電壓,將電池電壓經電阻分壓及阻容濾波電路濾波后作為STM32F103C8T6采樣輸入。
2.3 無線通信模塊及顯示模塊電路
無線通信模塊采用2.4 GHz頻段射頻芯片nRF24L01作為無線數據收發芯片,工作于2.4~2.5GHz ISM頻段,輸出功率和通信頻道可通過程序進行配置。nRF24L01功耗低,在以-6 dBm的功率發射時,工作電流只有9 mA;接收時,工作電流只有12.3 mA,多種低功率工作模式(掉電模式和空閑模式)使節能設計更方便。nRF24L01采用SPI總線方式與控制芯片進行通信。
12864液晶顯示模塊,可顯示漢字及圖形,內置8192個中文漢字(16×1 6點陣)、128個字符(8×16點陣)及64×256點陣顯示RAM(GDRAM),具有并行數據傳送方式和串行數據傳送方式,其中串行數據傳輸方式只用到CS、SID、SCK 3個通信引腳,較并行數據傳送方式節省單片機的I/O引腳,本文采用串行傳輸方式進行設計。
3 軟件系統設計
體感遙控器的軟件系統設計基于實時嵌入式操作系統μC/OS-II,借助于μC/OS-II內核的多任務管理和優秀的實時性能,大大簡化了軟件系統設計,并且可以保證系統響應的實時性。
3.1 任務分配與實現
在任務規劃的過程中,采用分層次和模塊化的思想將整個系統任務進行劃分。首先,我們必須對系統整體的控制任務有清楚地了解,具體任務劃分如表1所列。

表1中除OSTaskStat和OSTaskIdle任務為系統自帶,其他8個任務均為用戶創建。其中:App_TaskStart為起始任務,系統運行后第一個建立的任務,其作用是為初始化系統時鐘和底層設備創建所有事件和其他任務;App_TaskAD任務監視電池電壓的變化,當電壓低于設定值Low Battery時,將啟動蜂鳴器報警;App_TaskAHRS任務通過DMA不斷接收iNEMO慣性導航模塊數據,然后交由USART1接收緩沖區,實時獲得手部姿態信息;App_TaskCmd根據手部姿態信息轉化為機器人運動指令,然后按照制定的通信協議通過nRF24L01無線模塊將指令數據

萬能遙控器相關文章:萬能遙控器代碼
蜂鳴器相關文章:蜂鳴器原理 紅外遙控器相關文章:紅外遙控器原理












評論