基于超聲傳感技術的視覺自動識別系統

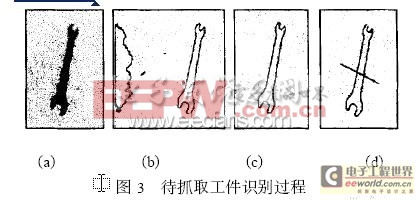
實驗結果表明, 采用本文提出的將機器人手- 眼視覺與超聲波測距相結合的檢測裝置, 以及融合二維圖像信息與深度信息進行工件識別與抓取的方法,可準確對物體進行識別與定位,具有算法簡單、計算量小、實時性好、可靠性高等特點,可為機器人與環境交互提供物體形狀、類別及大小等信息,使機器人裝配作業能適應各種復雜的環境與工藝過程,對實現工業生產過程的自動化、柔性化、智能化有良好的應用前景.
實驗結果表明, 采用本文提出的將機器人手- 眼視覺與超聲波測距相結合的檢測裝置, 以及融合二維圖像信息與深度信息進行工件識別與抓取的方法,可準確對物體進行識別與定位,具有算法簡單、計算量小、實時性好、可靠性高等特點,可為機器人與環境交互提供物體形狀、類別及大小等信息,使機器人裝配作業能適應各種復雜的環境與工藝過程,對實現工業生產過程的自動化、柔性化、智能化有良好的應用前景.

評論