PIC16F874單片機在直流電機無級調速系統中的應用

3.3 測速電路設計
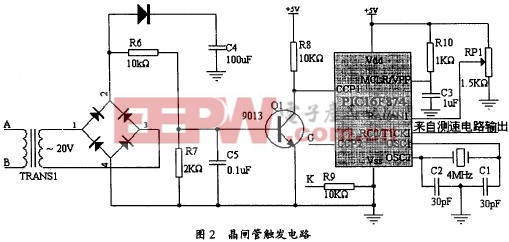
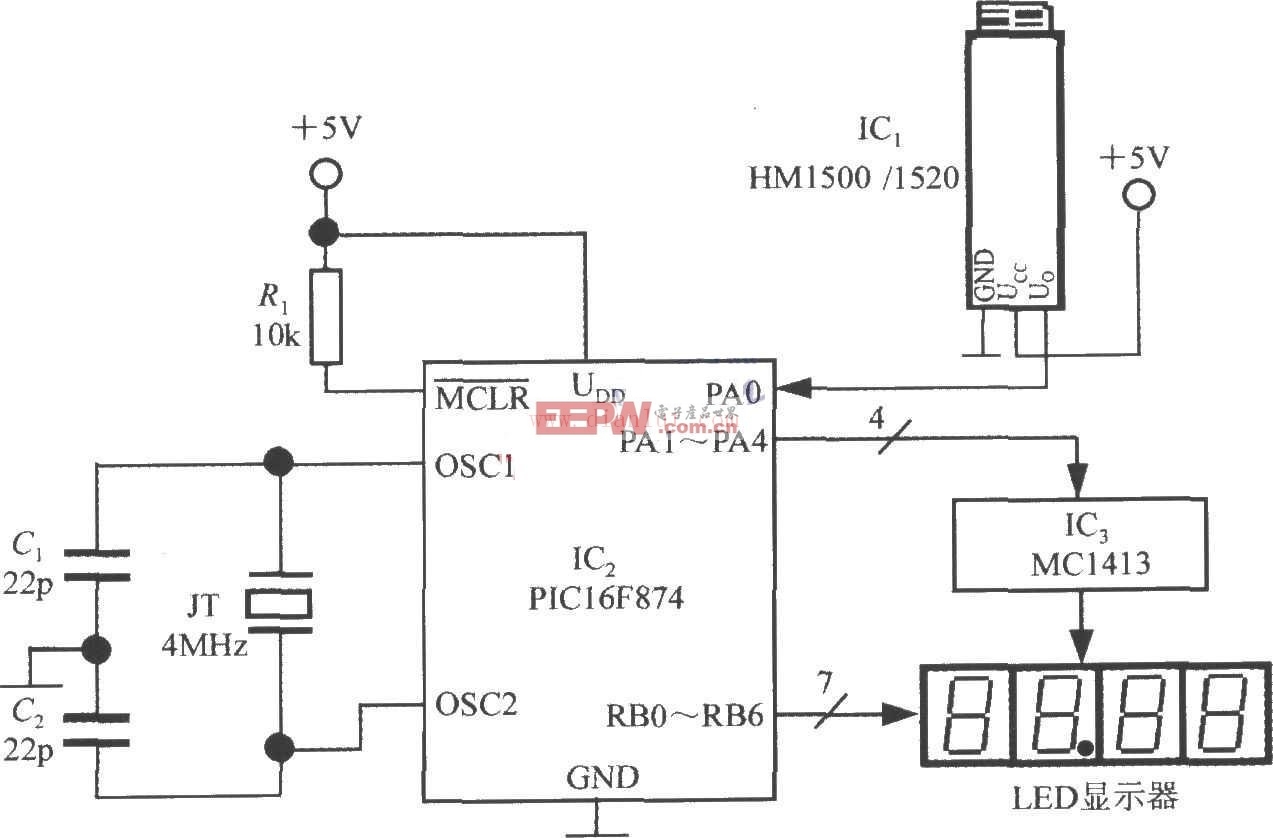
測速電路由附著在電機轉子上的光碼盤及電脈沖放大整形電路組成。電脈沖的頻率與電機的轉速成固定的比例關系,光碼盤輸出的電脈沖信號經放大整形為標堆TTL電平從PIC16F874單片機引腳RC0/T1CKI輸入,通過TMR1計數器進行計數,從而算出轉速,將這個轉速與預置轉速進行比較,得出差值,PIC16F874通過對這個差值進行PI運算,得出控制增量,在CCP2送出晶閘管控制角的大小,從而改變加在電機兩端的有效電壓,最終達到控制轉速的目的。
4 系統軟件設計
將速度閉環控制設計成為典型I系統,即PI調節器,用來調節晶閘管控制角時間Td,其控制算法為:
其中a1=Kp,Kp-控制器的比例系數,T1-積分時間常數,Ti-采樣周期。
本系統的軟件設計模塊主要包括CCP1上升沿捕捉模塊,CCP1下升沿捕捉模塊,控制角設定值A/D轉換模塊,測速電路脈沖定時計數模塊,PI調節器模塊,CCP2比較輸出模塊等,各模塊程序流程圖的關系如圖3所示。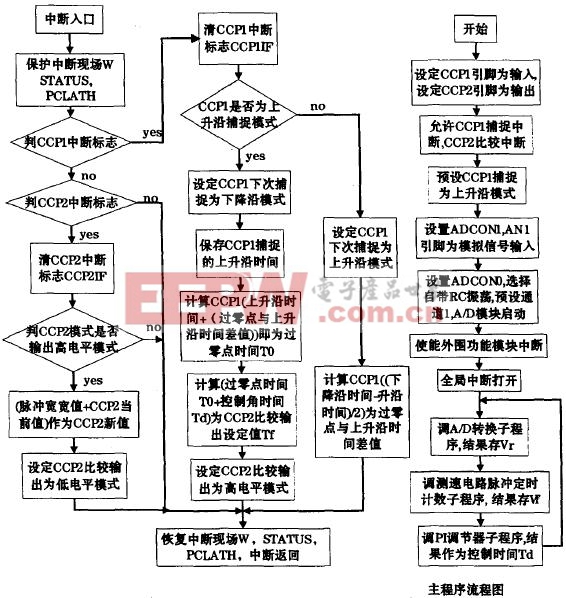
圖3 CCP1,CCP2模塊中斷程序流程圖
假設我們得到過零點時間為Tσ,晶閘管控制角時間為Td,那么送入CCP2寄存器CCPR2H:L比較值Tf=Tσ+Td,比較一致后,將在CCP2引腳上輸出高電平,使晶閘管導通,然后根據所需的觸發脈寬值,再次修改CCPR2H:L值,使輸出高電平觸發脈沖維持一定的時間后再回到低電平,這樣就完成一個雙向晶閘管觸發脈沖輸出。
5 結束語
本系統軟件、硬件設計充分利用了PIC16F874單片機捕捉、比較、模/數轉換模塊的特點,以及單片機振蕩頻率高,響應快等優點,設計出相應的觸發電路,使得PIC16F874單片機的模/數轉換模塊能迅速、準確的轉換速度設定值;CCP1模塊能精確捕捉交流電的過零點;測速電路的定時計數模塊能準確地計數,算出反饋轉速;CCP2模塊能及時地比較Tf值輸出觸發脈沖,在中小型直流電機調速系統應用中,具有結構簡單,運行可靠,調節范圍寬,電流連續性好,響應快等特點。





評論