單片機和MCP2510的CAN總線通信模塊設計

1.2 結構及工作原理
MCP2510有PDIP、SOIC和TSSOP三種封裝形式。圖2是MCP2510的內部結構框圖。CAN協議機負責與CAN總線的接口,SPI接口邏輯用于實現同MCU的通信,而寄存、緩沖器組與控制邏輯則用來完成各種方式的設定和操作控制。現結合其工作過程將各部分的功能、原理作一介紹。
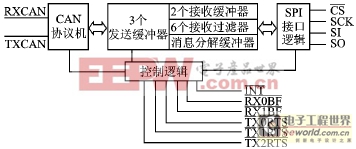
圖2 MCP2510內部結構框圖
(1) 收發操作
MCP2510的發送操作通過3個發送緩沖器來實現。這3個發送緩沖器各占據14字節的SRAM。第1字節是控制寄存器TXBNCTRL,該寄存器用來設定信息發送的條件,且給出了信息的發送狀態;第2~6字節用來存放標準的和擴展的標識符以及仲裁信息;最后8字節則用來存放待發送的數據信息。在進行發送前,必須先對這些寄存器進行初始化。
(2) 中斷管理
MCP2510有8個中斷源,包括發送中斷、接收中斷、錯誤中斷及總線喚醒中斷等。利用中斷使能寄存器(CANINTE)和中斷屏蔽寄存器(CANINTF)可以方便地實現對各種中斷的有效管理。當有中斷發生時,INT引腳變為低電平并保持在低電平,直到MCU清除中斷為止。
(3) 錯誤檢測
CAN協議具有CRCF錯誤、應答錯誤、形式錯誤、位錯誤和填充錯誤等檢測功能。MCP2510內含接收出錯計數器(REC)和發送出錯計數器(TEC)兩個錯誤計數器。因而對網絡中的任何一個節點來說,都有可能因為錯誤計數器的數值不同而使其處于錯誤激活、錯誤認可和總線脫離3種狀態之一。
2 MCP2510在智能節點中的應用實例
利用MCP2510和CAN總線收發器TJA1050可構成一個CAN總線分布式測控網絡。系統可包括一個主控制器和多個節點控制器,這種節點控制器可對電動機的電流、電壓及周圍的溫度進行監控,其結構如圖3所示。
這種網絡拓撲結構采用了總線式結構和無源抽頭連接,且結構簡單、成本低,因而系統的可靠性較高。其信息傳輸采用CAN通信協議,通信介質采用雙絞線。由于CAN總線是基于發送報文的編碼,不對CAN控制節點進行編碼,故系統的可擴充性比較好,同時增刪CAN總線上的控制節點不會對系統的其余節點造成任何影響。












評論