基于PIC單片機自動太陽跟蹤器的設計

光伏發電能為人類提供可持續能源,并保護賴以生存的環境,但其發電效率低,發電成本相對較高仍然足制約其大規模應用的重要因素。在沒有出現高效的光伏電池材料之前,研制具有實用價值太陽聚光器及自動跟蹤系統以實現低成本,則是促進太陽能廣泛應用的主要途徑之一。一般雙軸系統可提高發電量35%左右,單軸系統可提高20%左右,聚光型跟蹤系統會更高。
由于大部分光伏電站都安裝在偏遠地區,環境非常惡劣,維護困難,跟蹤系統增加了旋轉機構與相應的機械機構,可靠性明顯下降,如果不能保證整個系統的在各種環境下都能可靠穩定運行CONTROL ENGINEERING China版權所有,對整個光伏電站來說都可能將是災難性的打擊。
(2)跟蹤誤差大
尤其對反射聚
光的跟蹤系統,如果跟蹤誤差大,不但不能提高發電效率,反而會使電池板受光小均,產乍熱斑等影響,大大縮短了電池板的使用壽命。
(3)成本過高
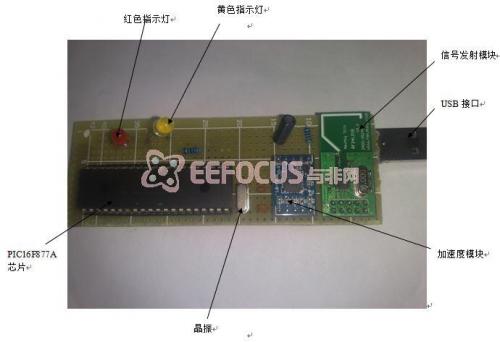
本文基于PIC16F877微處理器為核心,針對光伏發電系統,開發出一種雙軸自動自動太陽跟蹤器,他具有運行穩定可靠、跟蹤誤差小、成本低等優點。
1 自動太陽跟蹤器的基本原理[1-3]
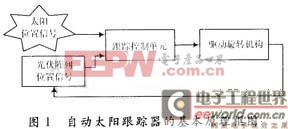
自動太陽跟蹤器,故名思意基本功能就是使光伏陣列隨著太陽而轉動,基本原理框圖如圖1所示。
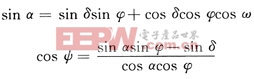
式中: δ為太陽赤緯角;φ為當地的緯度角;ω為時角。
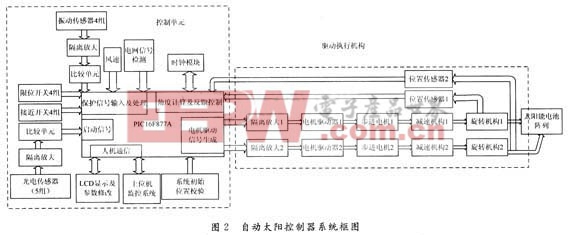
2 系統的整體設計方案
PIC16F877A是一款具有RISC結構的高性能中檔單片機,僅有35條單字指令,8 k×14個字節FLASH程序存儲器,368×8個字節RAM數據存儲器,256×8個字節E2PROM數據存儲器,14個中斷源,8級深度的硬件堆棧,內部看門狗定時器,低功耗休眠模式,高達25 mA的吸入/拉出電流,外部具有3個定時器模塊,2個16位捕捉器/16位比較器/10位PWM模塊,10位多通道A/D轉換器,通用同步異步接收/發送器等功能模塊[5]。
2.1控制單元硬件設計
(1)角度計算及反饋控制
(2)電機驅動信號生成
本文采用的是步進電機,其驅動脈沖由單片機內部自帶的10位PWM波發生模塊產生,只需在軟件中設置相應的有關參數就可改變電機的轉速;
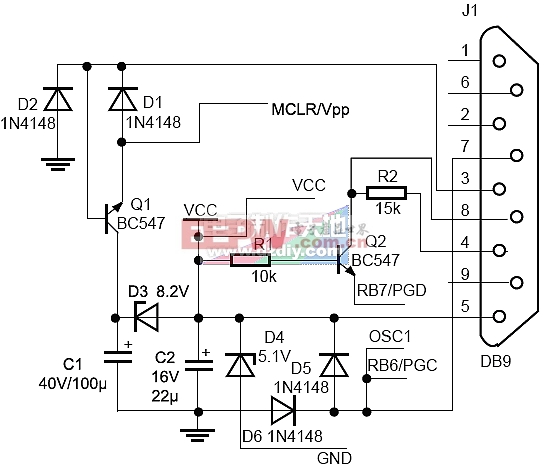
(3)上位機監控系統是利用單片機內部自帶的異步接受/發送器等功能模塊,硬件部分只需加MAX 232加以電平轉換,便可實現PC機與單片機的數據傳輸;
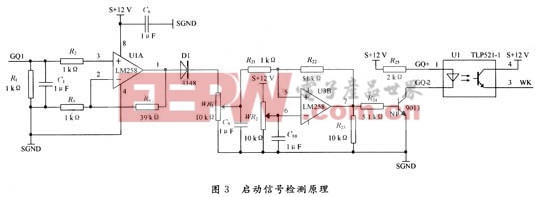
(4)考慮到光伏發電只有在太陽光強滿足一定強度的時候才能發電,啟動信號主要是利用光敏二極管檢測光強,保證系統在夜間
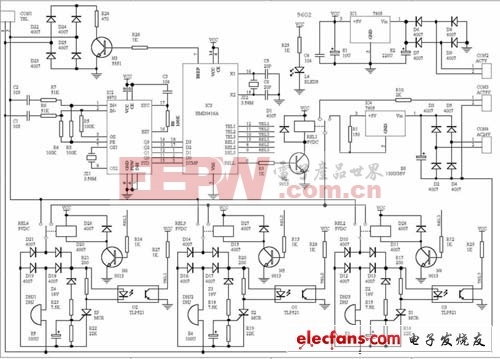
或陰雨天不滿足發電條件的情況下,系統停止跟蹤檢測電路如圖3所示。主要由放大、比較與光耦隔離3個部分組成。
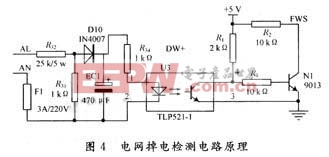
(5)系統的保護功能主要包括大風保護、電網掉電保護、振動過大保護、限位開關與接近開關保護組成,單片機檢測到保護信號產生時,便發出指令將系統停放在安全的位置上,確保整個系統不受損壞。圖4是電網掉電檢測電路原理圖,主要由降壓、整流與光耦隔離3個部分組成。
3 控制單元軟件設計
軟件是該控制系統的核心,除一些保護自鎖功能通過硬件實現外,大部分功能均通過軟件來實現,整個軟件采用C語言模塊化編程方式,易于系統的移植與集成。
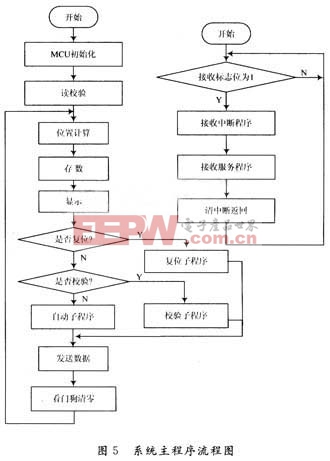
主程序與中斷服務子程序流程如圖5所示。
4 系統的抗干擾措施
能夠可靠穩定的運行是自動太陽跟蹤器成為成熟產品的前提,該系統從軟件與硬件兩個方面來增強抗干擾措施,主要手段有:
(1)外部輸入信號與控制系統信號不共地;
(2)有的外部輸入信號輸入到單片機內部之前都經過嚴格的光耦電路加以隔離;
(3)優化PCB布線結構,減少過孔,以降低寄生電容雜散電感的影響;
(4)保證整個系統可靠接地;
(5)外部信號采用屏蔽電纜線傳輸;
(6)軟件上增加軟件濾波、看門口定時器與軟件陷阱等措施,保證軟件在出現死機、跑飛等故障時能夠自我恢復。
(7)系統重要保護如限位保護均從軟件與硬件上加以雙重保護,以提高其可靠性。
5 結 語
自動太陽跟蹤器的穩定性與可靠性一直是其沒有被大規模應用的主要問題之一。
本文基于PIC16F877A單片機為控制核心,設計了一種自動跟蹤太陽高度角與方位角轉動的自動太陽跟蹤器,現場運行結果表明該系統跟蹤準確、能耗低、可靠性高、系統性能穩定,發電效率提高35%以上,對以后建設大型戈壁沙漠并網電站具有指導性意義。



評論