一種無人飛行器溫度巡檢裝置設計

本文引用地址:http://cqxgywz.com/article/235203.htm
4.軟件設計
溫度巡檢裝置的軟件以VHDL語言為基礎,采樣模塊化的設計思路編程,分為液晶顯示模塊、AD采樣模塊、鍵盤輸入模塊、報警模塊和PWM控制模塊模塊。圖4給出了各模塊之間的關系圖。
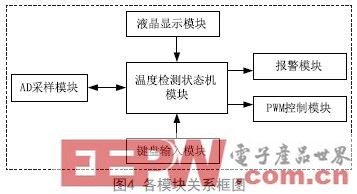
系統首先通過AD采樣模塊對溫度進行采樣,將采樣的數據送入溫度檢測模塊進行處理。溫度檢測模塊的任務是計算將采樣來的溫度值與系統的預設值之間的差值,利用差值的大小來控制PWM模塊輸出脈沖寬度不同的脈沖波,通過脈沖波開控制繼電器的通斷,從而達到溫度的恒定控制。
5.實測結果
5.1 系統的定標
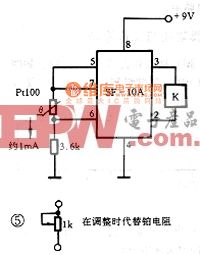
首先用高精度電阻箱代替鉑電阻傳感器Pt100對測量系統進行定標。根據式1所示的鉑電阻傳感器Pt100電阻和輸出電壓之間的關系,通過改變電阻箱的取值來設定相對應的測試溫度點標稱值,經過測量系統、A/D采樣的計算,得到測量溫度顯示值。根據初測數據對測量電路、補償電壓進行校準后,完成對系統的定標工作。
5.2 系統實測
將鉑電阻傳感器Pt100接入測量系統,并置入高精度恒溫箱中(溫控精度0.01℃)進行整個溫度測量系統定標測量。測量時要注意恒溫箱的密封,以提高環境溫度穩定性;恒溫箱溫度穩定后,每隔1min對同一溫度點進行20次測量。由表1中數據可見,測量系統的最大誤差為0.009℃,說明Pt100鉑電阻傳感器的定標誤差較小,精度也較高,能滿足高精度溫度測量系統的測量要求,但溫度高端誤差較大,可能與恒溫箱溫度控制精度有關,有待于進一步定標。

6.結論
本文提出了基于FPGA的無人飛行器溫度巡檢裝置的設計方案,該方案中所設計的無人飛行器溫度巡檢裝置利用FPGA快速性、可并行性、延時固定性等特點,能夠快速,準確的檢測無人機的各部件溫度。通過實驗驗證,系統的最大誤差不超過0.01度,完全滿足無人飛行器對溫度采集的要求。
蜂鳴器相關文章:蜂鳴器原理









評論