一種基于ATmega16 的電液伺服閥反饋控制器設計方案

實測數據滿足設計要求。電路中Q1、Q2接成達林頓管形式以增強三極管驅動能力。二極管D4防止在控制器故障被切除時伺服閥電流倒流入控制器。
本文引用地址:http://cqxgywz.com/article/236573.htm4 故障切換電路
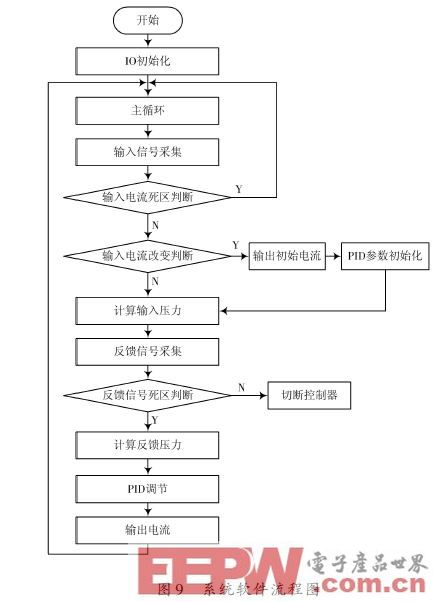
當系統發生故障時,系統需要切除控制器,不對輸入電流做調節使其直接輸入伺服閥。在此選用模擬電路切換開關MAX4660來實現。
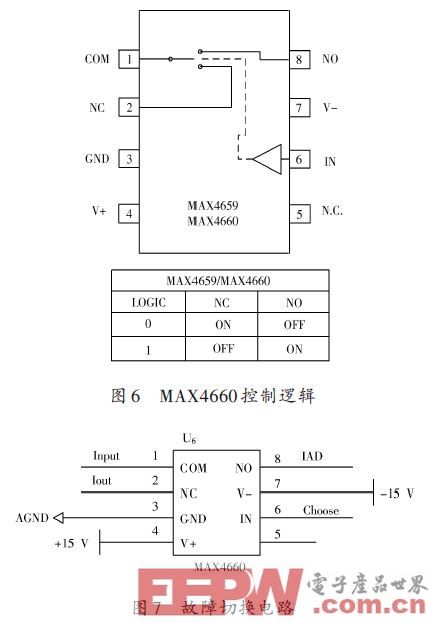
MAX4660可作為單輸入雙輸出選擇或者雙輸入單輸出選擇的電流型CMOS開關芯片。切換速度極快,控制簡單。具體參數為±15 V 供電;25 Ω的低開啟電阻;1.5 Ω的最大導通電阻;150 mA持續電流;200 mA最大峰值電流;低功耗,3 mW.
控制邏輯如圖6所示。故障切換電路如圖7所示。

Input 為外部電流信號,作為單一輸入端。Iout 和IAD 作為兩個選擇輸出端。IAD 連接系統輸入信號采集電路,Iout連接伺服閥。
當系統正常工作時,單片機給芯片6 引腳高電平,則Input與IAD接通,使單片機可以采集到輸入電流并進行控制調節。當系統故障時,單片機給芯片6引腳低電平,則Input與Iout接通,使輸入電流直接流入伺服閥。
5 系統控制算法
控制器采用傳統的增量式數字PID控制算法,并對其作出一定的改進以改善其性能,方便參數整定。
傳統增量式PID控制算法為:
這樣,對多個參數的整定調節問題簡化成了對一個參數KP 的整定。控制流程如圖8所示。

6 系統軟件設計
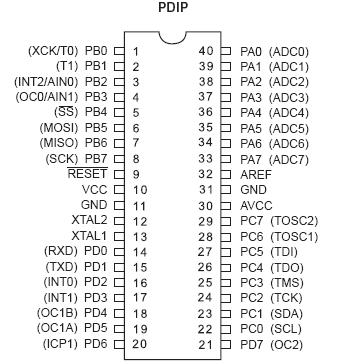
軟件結構采用前后臺系統設計,主程序是一個死循環結構,通過函數調用和全局變量與子程序進行參數傳遞[5].軟件流程如圖9所示。
輸入信號為4~40 mA 電流信號,反饋信號為4~20 mA電流信號。電流信號若小于4 mA則認為信號處于死區,輸入信號處于死區則控制器不予響應,輸入信號不在死區而反饋信號處于死區則認為系統故障,切斷控制器。
7 結束語
本文針對電液伺服閥在實踐應用中的不足,設計了電液伺服閥控制器,顯著提高了電液伺服閥在實踐應用中的穩定性和精確性。經過現場實際測試,該控制器實現了控制電液伺服閥穩定精確地輸出壓力,解決了電液伺服閥輸出壓力擺動、輸出壓力不足或過大的情況。并且通過故障判斷和故障自切除功能使系統工作更為可靠。





評論