汽車輪速傳感器設計中CAN總線的應用

輪速信號的檢測
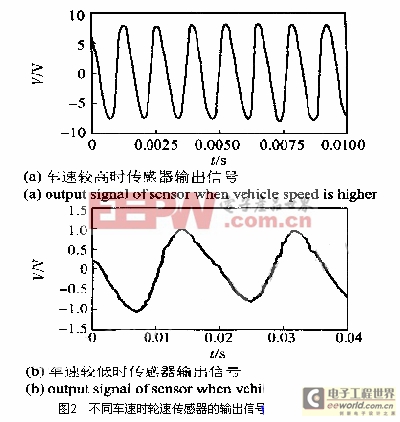
將輪速傳感器輸出的每個正弦波信號調理整形產生一個方波信號,后續電路對方波信號的處理可有以下幾種方法:(1)直接送單片機的T0記數,用T1作定時器。在每個T1定時時間內讀出T0的記數值,經計算得到輪速;(2)將方波信號先進行F/V轉換,再由單片機A/D轉換而得到輪速;(3)方波信號送單片機的外部中斷/INT0引腳,將其設定為邊沿觸發方式,用T1作定時器對方波信號進行周期測量,經計算得到輪速。第一種方法在低速時所測得的輪速誤差較大。假定輪速不變,每個T1定時時間讀一次T0的記數值,在T1i和T1i+1時間內讀得數值由于讀數時磁頭與齒頂的位置關系有時會相差1,輪速較低時, T1定時時間內T0的記數值較小,因而相對誤差較大,導致輪速識別的門檻值過高。第二種方法可提高低速時的測量準確度,但增加了硬件F/V和A/D轉換芯片的開支。第三種方法可以在不增加硬件開支的前提下,有效地提高低速時的測量準確度。
輪速傳感器系統硬件
輪速傳感器系統的硬件以80C31單片微機為核心(外部擴展8kRAM和8kEPROM)。外圍電路有信號處理電路、總線控制及總線接口等電路。其結構框圖如圖3所示。
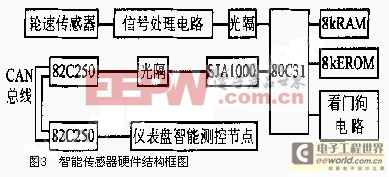
輪速傳感器產生信號經濾波、整形、光電隔離后,送80C31的/INT0輸入引腳。T1作定時器使用,對脈沖信號進行周期測量。SJA1000, 82C250組成與CAN總線的控制和接口電路。在輪速傳感器的設計過程中,充分考慮其抗干擾和穩定性,單片機的輸入/輸出端均采用光電隔離,用看門狗定時器(MAX813)進行超時復位,確保系統可靠工作。
信號處理電路
根據輪速傳感器信號特性,處理電路由限幅電路、濾波電路和比較整形電路組成,如圖4所示。
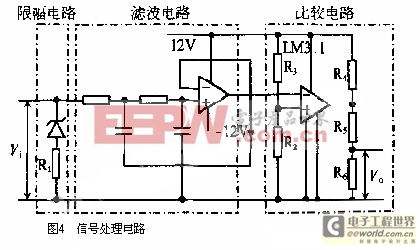
限幅電路將輪速傳感器輸出信號Vi正半周的幅值限制在5V以下,負半周使其輸出為-0.6V。濾波電路設計成帶反饋的有源低通濾波器,其截止頻率為 2075Hz(按最高車速為200km/h設計,傳感器輸出信號對應的頻率),選Q=0.707。比較整形電路中設置一定的比較電壓,與濾波器輸出信號相比較輸出方波信號。LM311N輸出方波的幅值為10V,經R5,R6分壓后得幅值為5V的方波信號送光電隔離器。












評論