混合電動汽車能量流仿真系統設計與分析

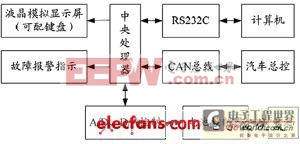
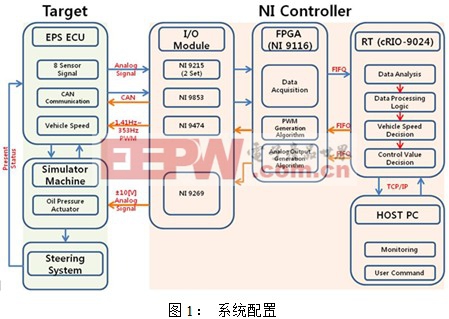
圖4 控制系統結構
選用Microchip公司的PIC18F6720為主控制器,該MCU片內集成多通道的10位精度的采樣轉換器,可以方便的采集電池的電壓、充電電流、放電電流和電池溫度等多種信號;內置兩個串行通信接口,可以與上位機進行異步通信;SPI接口可以用來擴展內部總線;PWM輸出可以對回路電流進行調節等。控制系統電路如圖5所示。
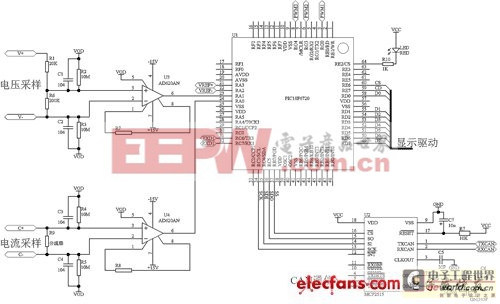
圖5 控制系統電路
4 人機交互
通過LCD顯示器可以直觀的顯示系統的工作狀態和電池工作情況,具有良好的人機交互界面。在控制系統中設置了短路與過熱保護,故障報警指示,最大限度達到系統的安全可靠,保護系統與動力電池的安全。圖6為LCD顯示的示意圖。
(a)工作狀態
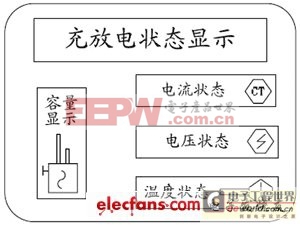
(b)測試狀態
圖6 LCD顯示示意圖
通信系統
系統內建了兩種通信總線:CAN2.0B和RS-232C。
1 CAN總線通信
CAN總線是專為解決現代汽車中各種控制器、執行機構、監測儀器和傳感器之間的數據通信而開發的總線式串行通信技術。但CAN只包括了物理層和數據鏈路層,在汽車工程師協會SAE推薦的標準SAE J1939進一步規范了汽車內部網絡的標準。

評論