三軸臺式工業機器人通用控制軟件設計

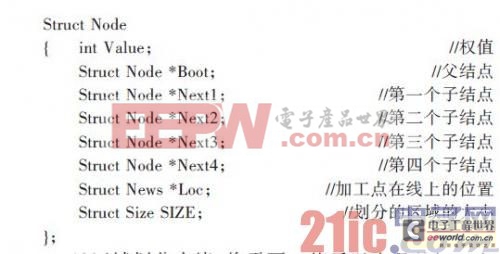
一旦區域劃分完畢,將需要一值予以表示其加工點的位置。采用結構體的形式予以表示,包括X,Y,Z三個坐標,表示其相對于所在結點空間的坐標。該結構體屬于環境單位結點的一部分,具體代碼如下:
Struct News
{int x;int y;int z;};
每一個環境單位結點都擁有自己的一個ID號,即該環境單位的大小及位置,具體代碼如下:
Struct Size
{int y;int z;int x;int Size;};
x,y,z分別是區域空間內該坐標軸上的最小值,Size表示該立方體區域的邊長。
4.2權值尋找
在路徑規劃上,采用權值尋找法。對每一個環境節點都進行一個權值的賦予,給予結點不同的優先級,權值越低,優先級越高,用于在路徑尋找中找到最優路徑。
例如,現有4個子節點A,B,C,D,給予A結點的權值為100,B結點的權值為80,C結點的權值為50,D結點的權值為10.現在在路徑規劃尋找最優路徑時,直接先尋找到D結點,然后繼續尋找下去,若出現多個優先級相同的結點時,則分而尋之,到尋找完畢之后,再進行最優路徑選取,可采用權值之和最小者優先的方法等[6].權值賦予的優先級按由高到低的順序排列為:存在加工點,靠近加工點,加工工件非加工點部分,其他區域。





評論