基于WLAN與單神經元自適應的空調系統設計

常規PID控制器的控制算法式為
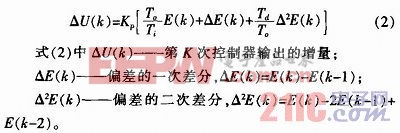
式(1)中為實際值與給定值的偏差,e(t)=yr-y;Kp為比例增益;Ti為積分時間常數;Td為微分時間常數。當采用周期T。較短時,離散化后,可得常規PID控制的增量型算式為:
結合以上的常規PID調節器的控制機理,一個基于單神經元模型的自適應PID控制器的結構圖如圖3所示。
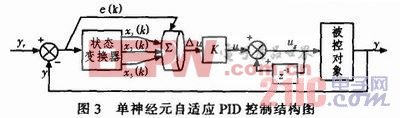
圖中狀態變換器的輸入為系統的輸出偏差信號e(k),yr為設定輸入,y為過程的實際輸出,ri為性能指標或遞進信號,K為神經元比例系數,K>0。該單神經元控制器有3個狀態變量xi(k)、x2(k)、x3(k),這里分別取為:
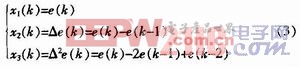
xi(k)(i=1,2,3)的這種取法有明顯的物理意義:x1(k)反映了系數誤差(相當于積分項),x2(k)反映了系統誤差的一階差分(相當于比例項),x3(k)反映了系統誤差的二階差分(相當于微分項)。本文的控制策略如下:

分別稱為該神經元控制器的積分系數、比例系數、微分系數。
單神經元自適應控制器是通過對加權系數的調整來實現自適應、自學習功能的。考慮到加權系數應和神經元的輸入、輸出和輸出偏差三者的相關函數有關,因此加權系數的調整采用有監督的Hebb學習規則,即:
式(6)、(7)中ri(k)——遞進信號或學習信號,ri(k)隨過程進行逐漸衰減;z(k)——輸出誤差信號,z(k)=y,(k)-y(k)=e(k);ηi——學習速率,ηi>0。
可以證明當偏差e(k)充分小時,wi(k)可收斂到某一穩定值
為保證上述控制學習算法的收斂性和魯棒性,對上述學習算法進行規范化處理,得:
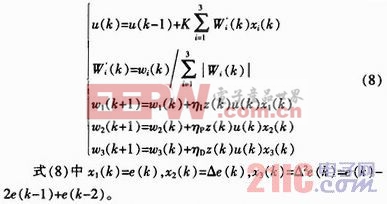
ηI,ηP,ηD——分別為積分、比例、微分的學習速率。由式(8)可看出,單神經元自適應PID控制器是依據學習信號所反映的誤差與環境的變化來對相應的參數進行在線調整,并產生自適應控制作用,這充分體現了其強魯棒性。
5 結束語
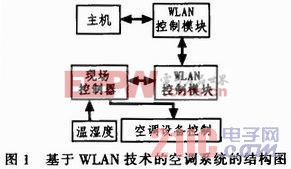
根據以上設計的空調系統,將WLAN技術與單神經元自適應PID控制結合起來,通過工控機實現實時監控,控制效果良好。選擇WLAN技術不但減少了布線所需的人力物力的消耗,也增加了系統的靈活性、移動性。同時加上單神經元自適應PID控制,使系統具有無靜差、無超調、魯棒性好等優點。

pid控制器相關文章:pid控制器原理
評論