基于CAN總線的掘進機懸臂控制系統

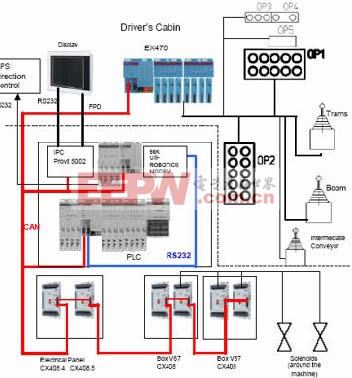
該系統采用基于貝加萊2003系列PCC作為主控制單元,完成電氣系統各單元的啟、停以及與生產過程相關聯的各種邏輯的集中控制。摒棄傳統的繼電器,實現了電動機的過熱、過流、過載、缺相以及36V、220V漏電和主回路漏電閉鎖等保護。電子保護電路通過電流互感器對回路的實時監控,能夠準確地判斷相關回路的運行狀態,并及時將結果反饋到主控單元PCC中,從而實現相應的電氣動作。
另外,該系統還選用了貝加萊PowerPanel作為系統狀態顯示設備。它通過中文界面向用戶顯示系統的運行和故障狀態,使用戶能夠及時地了解系統情況,并能夠根據顯示提供的信息快速地處理系統故障。

評論