多點定位測試儀數控系統技術開發

測試儀的工作要求是能夠從“當前點位”向“任一點位”運行。而且循環次數可以任意設定。
3.2對運動邏輯的分析:
測試儀的定位點共有10點,工作臺可能定位在任意一點,如果要求從“當前點位”向“任一點位”運行,則可能有9種運動路徑選擇,如果加上“同號選擇”判斷,整個系統就有10*10=100種運動路徑選擇,這意味著運動程序至少要100個判斷條件+90條運動流程。這樣的運動程序就太復雜了。
能不能簡化其運動程序呢?
仔細分析測試儀的工作臺運動方式:從“當前點位”到“下一點位”都要先回到Y0位置,再沿“X”軸運行,根據選擇的條件,向“下一點位”運行。
這樣如圖2所示在X軸上設置一原點,不管工作臺當前定位在任一點位上,當指令其向“下一點位”運動時都先執行“回原點”動作,再從原點向“下一點位”運動。這樣全部運動流程就可以從90條簡化為9條,這樣就可以大大簡化運動程序的編制,提高了程序安全系數。由于原點選擇在中間位置,從統計學的角度來看,對工作效率影響不多。
3.3運動程序的編制
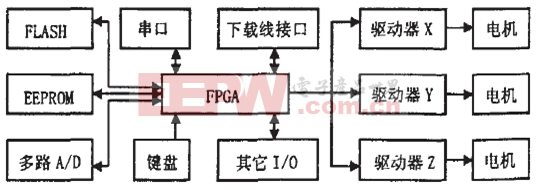
三菱定位單元FX2N-20GM是一個可以獨立做運動控制的數控系統。
其運動程序可以用編程器編制,也可以用專用軟件編制。編制運動程序的專用指令類似于通用的G代碼指令。
3.3.1專用指令型運動程序
應用FX2N-20GM專用的運動指令編制的部分“定位運動程序”如下:
運動程序 (運動流程選擇部分)
N1 LD M701-----------選擇條件:如果選擇1#位
N2 FNC00(P1)-----------跳躍至“P1”指針程序段
(………….)
N22 LD M710-----------選擇條件:如果選擇10#位
N23 FNC00(P10) -----------跳躍至“P10”指針程序段
……….
N30 P1---------------------回1#位程序段
N31 cod00 Y0 f2000-----------回到“Y軸原點”
N32 cod00 X0 f2000---------- 回到“X軸原點”
N33 cod00 xD106 fxD108;---- ---回到1#位“X位置”處
(X位置用D106設置,運行速度用D108設置)
N34 cod00 yD110 fyD112; ---- ---回到1#位“Y位置”處
(Y位置用D110設置,運行速度用D112設置)
N35 M02(END)-----程序結束
3.3.2應用專用編程軟件“FXVPS”編制的運動程序:
專用編程軟件“FXVPS”是專門用于FX2N-20GM的圖形式編程軟件,具有運動流程構建方便清楚、特別易于構建多流程運動程序,易于設定參數,方便調試及監控等特點。
構建“運動程序”前,必須反復了解客戶要求,大處著眼,先構建好“運動流程”。然后再細化小節部分。不能先做小節再做流程。
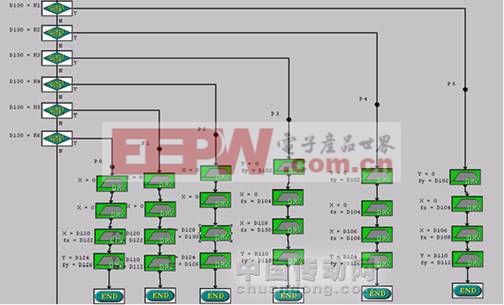
圖3 運動流程
3.定位單元FX2N-20GM與PLC的聯機通信
4.1定位單元FX2N-20GM與PLC的聯機通信的專用指令及PLC程序
三菱定位單元FX2N-20GM的另一特點是可以與三菱PLC聯機使用,通過使用PLC控制器與FX2N-20GM的通信功能,在PLC控制器一側編制相關的控制程序實現工作模式選擇,發出程序啟動指令,設置定位距離、定位速度,循環次數等數據,以實現系統更柔性化的控制。在本控制系統中,就是采用了“PLC+FX2N-20GM”工作模式。其PLC與“FX2N-20GM”之間的通信程序就是整個PLC程序的關鍵。



評論