探測機器人煤礦井下地圖創建

3.2柵格定位及坐標變換
通過立體視覺系統的感知,可以獲得現場地形的三維點集合,這些離散的點集合可以用于描述地形環境的表面輪廓,從而構成了目標地形的三維點云描述,其中點的坐標描述了該視差點相對攝像機的位置。對于局部地圖的創建,需要將這些三維點云描述首先由立體相機坐標系轉化到機器人坐標系當中,并以此作為機器人此次路徑規劃的局部環境描述。而后,在進行全局路徑規劃之前,需要將上述坐標從機器人坐標系轉換到世界坐標系,即井下環境全局地圖坐標系當中,這主要通過機器人的定位及姿態估算信息進行推算,完成坐標變換后,進而可以完成局部地圖與全局地圖的融合。坐標系的定義及轉換關系如圖2.
當機器人在未知環境中進行自主導航時,若沒有外部提供的全局定位信息,一般采用自主導航開始時,機器人的初始位置為世界坐標系的零點。用立體攝像機采集圖像就是將客觀世界的3D場景投影到2D像平面上,這個場景可以用成像變換來描述。成像變換涉及到不同坐標系統之間的變換,立體攝像機進行圖像采集的最終結果是要得到計算機里的數字圖像,因此在成像變換時需要用到以下坐標系。以機器人的姿態確定各坐標軸的方向。如圖2所示,本文采用機器人的前向作為z軸,以處在相同水平面的指向機器人右側與z軸垂直的方向作為x軸,最后以右手法則確定y軸。
世界坐標系:Xw,Yw,Zw,為基準坐標系,刻度單位為物理單位
圖像坐標系:(u,v),(x,y)
(u,v):為以像素為單位的圖像坐標系的坐標,表示像素在圖像中的行數和列數
(x,y):以物理單位表示的圖像坐標系
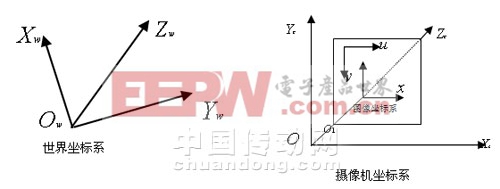
圖2世界坐標系和攝像機坐標系
攝像機坐標系:Xc,Yc,Zc
其原點O位于攝像機的光心,Xc,Yc分別與圖像坐標系的x,y軸平行,Zc為攝像機的光軸,且與圖像平面相互垂直。光軸與圖像平面的交點為圖像坐標系的原點。
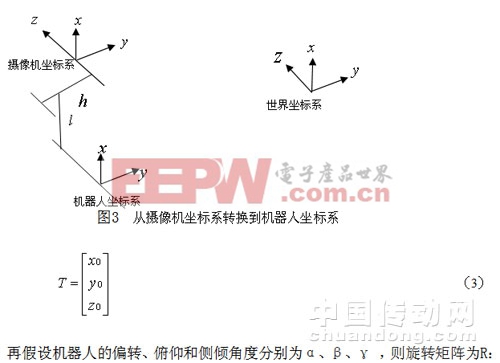
機器人坐標系:Xr,Yr,Zr
安裝在機器人上的立體視覺系統與機器人是固連的,根據以上坐標軸的定義,若以右攝像機的光心為攝像機坐標系的原點,則攝像機坐標系與機器人坐標系之間的轉換關系為
Xc=Xr+l;Yc=Yr+h;Zc=Zr(1)
其中,l為右攝像機光心與機器人坐標系原點(一般為機器人質心)之間的水平距離,h為右攝像機光心與機器人坐標系原點之間的垂直距離。轉換為齊次坐標轉換為
 (2)
(2)當需要將三維點的坐標由機器人坐標系轉化到世界坐標系中時,如圖3所示,需要機器人自定位功能提供機器人的位置與姿態信息,假設機器人的位置在世界坐標系中的三維坐標為(x0,y0,z0),即機器人坐標系的原點。則機器人坐標系與世界坐標系之間的平移矩陣為T:
 (4)
(4)若以任務開始時機器人的位置與朝向定義為全局坐標系的原點,則機器人坐標系中的點P(Xr,Yr,Zr)到全局坐標系中對應點P’(Xw,Yw,Zw)的轉換如式如下:
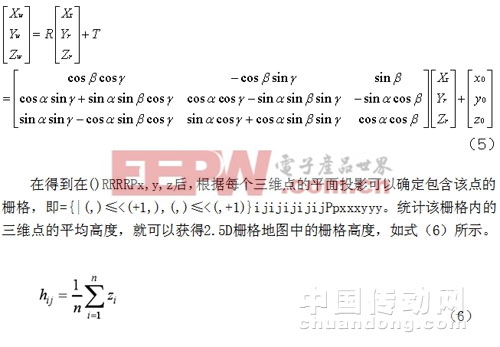
具體的實現過程可以由圖3-13所示。其中圖3-13(a)為一對立體視覺圖像中右攝像機獲得的圖像。圖3-13(b)為根據立體匹配方法獲得視差圖。基于三角法,可以計算得到相對與攝像機坐標系的地形輪廓三維點云描述()CCCCPx,y,z,如圖3-13(c)中所示。其為攝像機前方扇形區域內的地形輪廓。根據式(3-13)可將()CCCCPx,y,z轉化為相對機器人的描述()RRRRPx,y,z。在此基礎上,可以為每個數據點確定其所屬的柵格。最后,根據式(6)計算柵格的高度,得到位于機器人前方扇形區域內的環境2.5D柵格地圖描述。環境的全局2.5D柵格地圖由機器人在各個不同的位置獲得的局部2.5D柵格地圖,依據自主定位獲得的機器人位姿信息拼接而成。環境局部2.5D柵格地圖與全局2.5D柵格地圖的數據轉換依據式(5)進行。
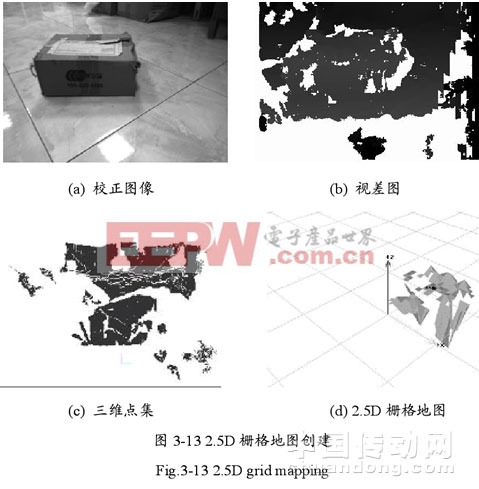
圖3-132.5D格柵地圖創建 三維掃描儀相關文章:三維掃描儀原理 熱成像儀相關文章:熱成像儀原理


評論