基于模糊神經混合系統的自適應控制方法及其應用

3 仿真實驗
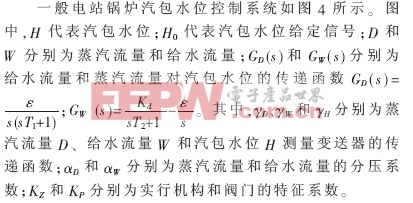
電站鍋爐汽包水位間接的反應了鍋爐負荷與給水平衡的關系,是鍋爐運行的主要指標之一。水位過高,會破壞汽、水分離裝置的正常工作,嚴重時會導致蒸汽帶水增多,從而增加過熱器管壁上和汽輪機葉上的結垢;水位過低時,則會破壞水循環,引起水冷壁的破壞。近年來鍋爐參數的提高和容量的擴大,對給水系統提出了更高的要求。因此,迫切需要一種魯棒性很好,算法相對簡單的快捷控制方案。
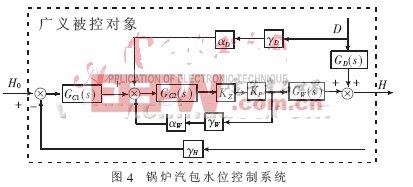
將圖4框內的一個廣義對象當一個整體去考慮,可以消除水流量和蒸汽對汽包水位的傳遞函數不穩定環節,克服自平衡特性。神經網絡具有充分逼近任意復雜系統的能力,同時還能學習和適應不確定性的動態響應。為檢驗所提出的控制策略的有效性,對圖4中的被
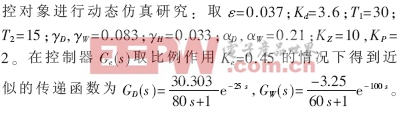
采用本文提出的基于模糊神經混合系統的自適應控制方法,其對比試驗采用PID串聯控制系統,PID調節器參數是在折中考慮系統的跟蹤性、抗外擾能力和抗內擾能力的基礎上,經過整定得到的,其外回路KP=1.5,Ki=0.005,內回路KP=0.95[7]。
圖5所示為對象模型匹配情況下的輸出響應圖。圖6為給水量信號H=0 mm時,在起始時刻加入蒸汽流量30 %外擾時輸出響應曲線。
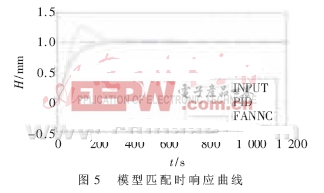
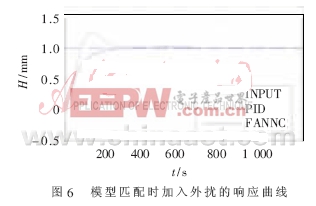
圖7所示為對象時間為常數,增益常數和延遲時間均增大20%的輸出響應曲線。圖8在模型失配情況下,在給水流量信號H=0 mm時,加入蒸汽流量的30%外擾時輸出響應曲線。
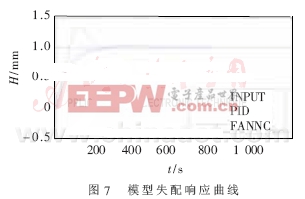
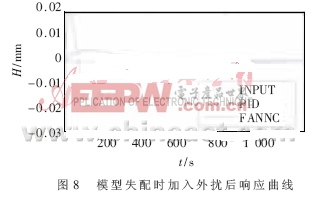
從圖中可以看出,較之串級PID控制,FANNC控制具有良好的動態調節品質和較強的魯棒性,實現了對系統的快速無超調控制。實驗中將蒸汽流量擾動信號引入到神經網絡中,實現了對系統的前饋補償,以快速平穩消除蒸汽流量的擾動。魯棒控制器FC的構造使系統具有良好的穩定性和魯棒性,與常規PID控制相比,幾乎沒有超調量。即使在模型失配(參數增加或減少)的情況下仍然能取得滿意的控制品質。仿真結果表明了該方案的有效性和優越性。
本文提出的這種基于模糊神經混合系統的自適應控制方法是針對工業系統中普遍存在的復雜非線性和時變不確定性特性提出的。該方法可以做到無須辨識被控對象的模型,即可進行NNC的在線設計;而且NNC的學習過程和系統的控制過程同時進行,不需要特定的教師信號,避免了離線訓練通常存在的訓練數據不足的問題。利用模糊推理機產生的分目標學習誤差對神經網絡進行訓練,避免了采用直接反饋誤差進行訓練可能造成的飽和和過調整問題,并能有效抑制測量噪聲的影響,提高系統的控制品質。仿真實驗證明,該方法能有效處理工業系統中普遍存在的復雜非線性和時變不確定性等特性,為未知不確定非線性系統的智能控制提供了一條有效而可行的新途徑。


評論