基于DSP的空間光通信APT運動控制箱設計

4運動控制箱軟件設計
4.1系統初始化設置
DSP上電復位后要進行的初始化設置主要包括:系統設置、I/O端口設置、PWM(脈寬調制電路)輸出設置、串口通信設置以及LCD初始化設置。其中,液晶初始化需設置:圖形區首地址和寬度、文字區首地址和寬度,光標形狀和是否閃爍、光標指針、地址指針。為了保證顯示效果,還需執行一次清屏操作。由于清屏操作時間較長,將自動觸發看門狗,導致系統初始化無法繼續。故編寫復位和中斷向量文件vectors.asm,使DSP上電后直接進入DisableWatchdog()函數。該函數的功能為禁止看門狗,并跳轉到復位向量處。下面給出了該函數的核心代碼:
4.2掃描算法實現
掃描算法的核心是如何在最短時間內掃描覆蓋信標光的所有可能出現的區域。常見的掃描算法主要包括矩形掃描、螺旋掃描、矩形螺旋掃描、玫瑰形掃描及李薩如形掃描等。綜合考慮掃描性能與DSP實現難度,確定采用光柵螺旋掃描算法和蜂窩螺旋掃描算法。這兩種算法都能以較小的掃描步數實現大范圍的掃描策略,掃描重疊區域小,可在短時間內實現高性能掃描,但算法實現相對復雜。以蜂窩螺旋掃描算法為例,其蜂窩螺旋掃描排列方式如圖4所示。
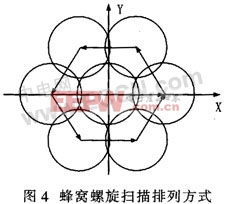
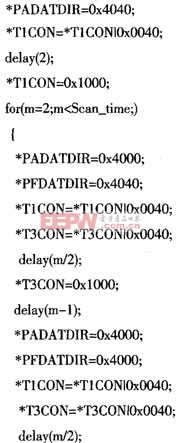
圖中小圓代表一個掃描子區,以蜂窩狀六邊形方式重疊。每個子區的直徑為信標光發散角大小,從而得到相鄰兩個子區圓心間距離,即光柵螺旋掃描算法的掃描步長。根據該掃描步長分別得到水平和俯仰兩個方向電機執行步長,從而通過控制電機運動實現蜂窩螺旋掃描算法,其程序代碼如下:

4.3精確跟蹤實現









評論