基于ADSP-TS101S的自適應動目標顯示系統設計

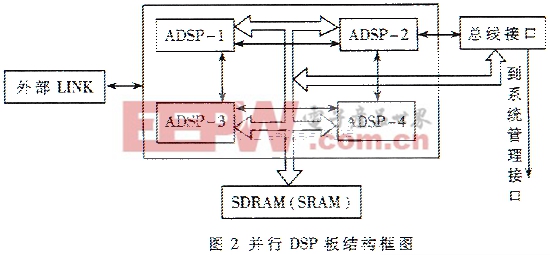 2 系統構成及硬件設計 2.1 系統構成 自適應信號處理系統由地雜波通道(GCFC)、動雜波通道(MCFC)和正常通道(NRC)三部分組成,原理框圖如圖1所示。 針對不同的雜波環境,應選擇不同的通道。當無雜波時,目標在正常通道檢測,采用慢門限恒虛警(CFAR)處理以減少損失;當在地雜波環境時,正常雷達通道采用雜波圖設置門限,實現超雜波檢測,主要檢測低速度運動目標,大部分情況下,地雜波濾波器動目標信號最強,是地雜波環境下的主要檢測通道;當在動雜波環境時,動雜波濾波器通過速度估值器修改濾波器權系統,移動濾波器口對準雜波多卜勒頻率中心,濾除動雜波,完成目標檢測。動雜波疊加在地雜波上時,主要通過動雜波濾波器通道檢測目標信號。 2.2 硬件構成 ADSP-TS101S提供了強大的多處理器并行處理能力,允許某一處理器直接訪問其它處理器的內部雙口靜態隨機存取存儲器(SRAM),并且這種訪問一般不影響被訪問處理器的工作。在此系統設計中,采用四片ADSP-TS101S組成TeshSP(網絡)結構并行處理系統,各個處理器通過鏈路口實現信息交換,數據流輸入和輸出通過外部總線接口實現。其系統結構框圖如圖2所示。 其中,ADSP-1負責正常通道的檢測,包括求模/取對數、幅度雜波圖、脈沖重復頻率(PRF)鑒別、雜波圖對消、CFAR及系統噪聲估值等單元。ADSP-3負責地雜波通道的檢測,ADSP-4負責動雜波通道檢測及輸出目標合成,ADSP-2則負責系統自舉、將送進來的正交數字信號進行數字脈沖壓縮及送出脈沖壓縮后的信號。
2 系統構成及硬件設計 2.1 系統構成 自適應信號處理系統由地雜波通道(GCFC)、動雜波通道(MCFC)和正常通道(NRC)三部分組成,原理框圖如圖1所示。 針對不同的雜波環境,應選擇不同的通道。當無雜波時,目標在正常通道檢測,采用慢門限恒虛警(CFAR)處理以減少損失;當在地雜波環境時,正常雷達通道采用雜波圖設置門限,實現超雜波檢測,主要檢測低速度運動目標,大部分情況下,地雜波濾波器動目標信號最強,是地雜波環境下的主要檢測通道;當在動雜波環境時,動雜波濾波器通過速度估值器修改濾波器權系統,移動濾波器口對準雜波多卜勒頻率中心,濾除動雜波,完成目標檢測。動雜波疊加在地雜波上時,主要通過動雜波濾波器通道檢測目標信號。 2.2 硬件構成 ADSP-TS101S提供了強大的多處理器并行處理能力,允許某一處理器直接訪問其它處理器的內部雙口靜態隨機存取存儲器(SRAM),并且這種訪問一般不影響被訪問處理器的工作。在此系統設計中,采用四片ADSP-TS101S組成TeshSP(網絡)結構并行處理系統,各個處理器通過鏈路口實現信息交換,數據流輸入和輸出通過外部總線接口實現。其系統結構框圖如圖2所示。 其中,ADSP-1負責正常通道的檢測,包括求模/取對數、幅度雜波圖、脈沖重復頻率(PRF)鑒別、雜波圖對消、CFAR及系統噪聲估值等單元。ADSP-3負責地雜波通道的檢測,ADSP-4負責動雜波通道檢測及輸出目標合成,ADSP-2則負責系統自舉、將送進來的正交數字信號進行數字脈沖壓縮及送出脈沖壓縮后的信號。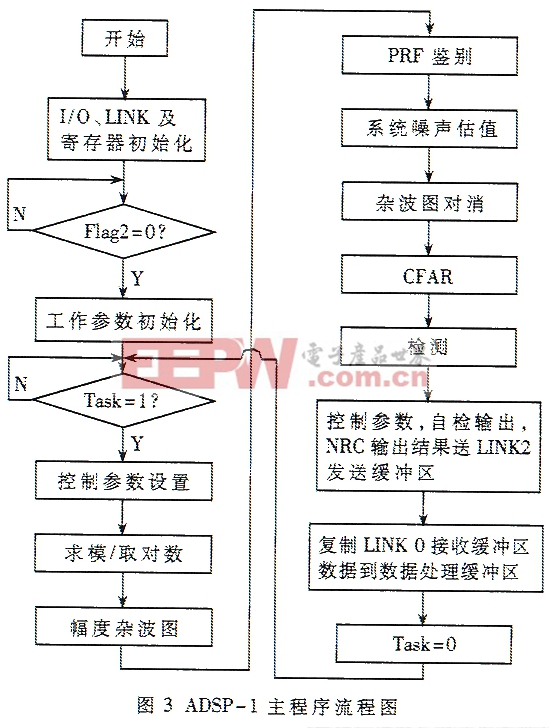 在實際應用中,為了增加可靠性,系統采用八片DSP分成兩組,一組為主處理模塊,一組為從處理模塊,從處理模塊作為主處理模塊的鏡像。當主處理模塊發生故障時,整個系統仍能正常工作。最后可得能家長運算板單板運算速度為每秒160億次40位乘法累加或40億次80位乘法累加運算,可滿足常規地面雷達信號處理需求。 3 軟件設計 3.1 主程序設計 主程序完成DSP的初始化并對接收到的數據進行相應處理。初始化包括對I/O、Link口及寄存器等的初始化。ADSP-1、ADSP-2、ADSP-3、ADSP-4每一個都有自己的單獨主程序。現以ADSP-1為例給出設計流程圖,如圖3所示。
在實際應用中,為了增加可靠性,系統采用八片DSP分成兩組,一組為主處理模塊,一組為從處理模塊,從處理模塊作為主處理模塊的鏡像。當主處理模塊發生故障時,整個系統仍能正常工作。最后可得能家長運算板單板運算速度為每秒160億次40位乘法累加或40億次80位乘法累加運算,可滿足常規地面雷達信號處理需求。 3 軟件設計 3.1 主程序設計 主程序完成DSP的初始化并對接收到的數據進行相應處理。初始化包括對I/O、Link口及寄存器等的初始化。ADSP-1、ADSP-2、ADSP-3、ADSP-4每一個都有自己的單獨主程序。現以ADSP-1為例給出設計流程圖,如圖3所示。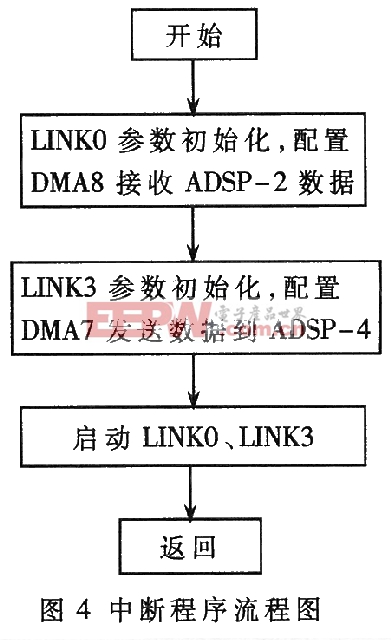 3.2 中斷服務程序 中斷服務程序主要處理各DSP之間鏈路口接收或發送數據,實現DSP之間的相互通訊。對ADSP-1而言,其中斷程序主要啟動LINK0,接收ADSP-2脈沖壓縮后的輸出和控制參數;啟動LINK3,傳送ADSP-1自檢數據、NRC數據及控制參數,如圖4所示。 基于ADSP-TS101S的AMTI處理系統,所需外圍器件少,電路設計簡單,系統可靠性高,研制周期短,具有很強的擴展性和通用性。經過整機測試,在天線掃描一圈的時間(10秒)內,該處理系統可完成10000點的點跡處理,地雜波改善因子大于60dB,動態波改善因子大于28dB,性能指標達到設計要求。隨著芯片技術的進一步發展,將來有望能在單片DSP中實現整個AMTI。
3.2 中斷服務程序 中斷服務程序主要處理各DSP之間鏈路口接收或發送數據,實現DSP之間的相互通訊。對ADSP-1而言,其中斷程序主要啟動LINK0,接收ADSP-2脈沖壓縮后的輸出和控制參數;啟動LINK3,傳送ADSP-1自檢數據、NRC數據及控制參數,如圖4所示。 基于ADSP-TS101S的AMTI處理系統,所需外圍器件少,電路設計簡單,系統可靠性高,研制周期短,具有很強的擴展性和通用性。經過整機測試,在天線掃描一圈的時間(10秒)內,該處理系統可完成10000點的點跡處理,地雜波改善因子大于60dB,動態波改善因子大于28dB,性能指標達到設計要求。隨著芯片技術的進一步發展,將來有望能在單片DSP中實現整個AMTI。











評論