基于軟件無(wú)線電的擴(kuò)頻通信同步研究
作者:
時(shí)間:2007-03-09
來(lái)源:網(wǎng)絡(luò)
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
 式中T為碼元速率的倒數(shù),Δf為接收端載波相對(duì)于發(fā)送端載波頻率的偏移,φ為接收端相對(duì)于發(fā)送端的未知相偏(由兩二甲基甲酰胺波的相位差及信道時(shí)延造成)。 由上述推導(dǎo)不難發(fā)現(xiàn),由于頻偏(Δf)的存在,它對(duì)相關(guān)峰有一定影響,呈Sa(πΔfT)關(guān)系。在頻偏小時(shí),它對(duì)于求相關(guān)峰的影響可以忽略。 2.2.2 收發(fā)兩端信息流頻率源不一致問(wèn)題分析 如果收發(fā)兩端真正同步,那么發(fā)端的信息流速率應(yīng)與收端解碼速率一致,而一般對(duì)碼片采樣點(diǎn)為一整數(shù),那么此時(shí)收端采樣頻率(fs)應(yīng)與發(fā)端擴(kuò)頻碼速率(RN)的比值為一整數(shù);不妨設(shè)為M,則有: fs=M%26;#215;RN (5) 設(shè)擴(kuò)頻碼長(zhǎng)為L(zhǎng)N,每碼片采樣M,則理論上采樣一條擴(kuò)頻碼的樣點(diǎn)值Ns有: Ns=LN%26;#215;M (6) 從上面推導(dǎo)還不可知載波的頻偏只影響盯關(guān)峰峰值,不影響對(duì)擴(kuò)頻碼采樣獲得的樣點(diǎn)數(shù)。然而,如果收端與發(fā)送之間的信息流頻率不一致,采樣的一條擴(kuò)頻碼的點(diǎn)數(shù)N’s可能不等于Ns;如果采樣速率f’s>M%26;#215;RN,則估計(jì)出的下一幀擴(kuò)頻碼起始位置就比實(shí)際的起始位置要偏后;為了盡可能減少收發(fā)兩端信息流頻偏值,應(yīng)盡可能選用穩(wěn)準(zhǔn)度較高的晶振,盡可能保證傳一幀擴(kuò)頻碼的時(shí)間Ts內(nèi)實(shí)際采樣點(diǎn)與理論采樣點(diǎn)相差很小。然而,在同步搜索階段,由于沒(méi)有任何有用信息,在DSP處理時(shí),運(yùn)算量非常大,要判斷擴(kuò)頻碼的起始位置,同時(shí)估計(jì)系統(tǒng)的載波頻偏,一般不可能實(shí)時(shí)處理完畢,這就需要采取拋幀處理。即在處理當(dāng)前幀時(shí),將隨后的若干幀丟掉,為了準(zhǔn)確估計(jì)所拋幀數(shù),一般利用定時(shí)器的定時(shí)功能丟棄數(shù)據(jù)從而間接實(shí)現(xiàn)準(zhǔn)確拋數(shù)據(jù)幀數(shù)據(jù) 。前提是先假設(shè)收發(fā)數(shù)據(jù)流一致,通過(guò)估計(jì)傳一幀擴(kuò)頻碼所需時(shí)間來(lái)估計(jì)需要拋幀數(shù)據(jù)的時(shí)間。然而,實(shí)際中一般收發(fā)數(shù)據(jù)流不一致,雖然差異較小,但這樣可能因?yàn)槔塾?jì)偏差最后使得起始位置偏離所估計(jì)的位置。這就需要DSP控制DDS來(lái)調(diào)整接收端頻率源,保證收發(fā)兩端頻率源一致。 3 基于DSP的同步算法 3.1 載波頻偏估計(jì)算法 對(duì)于載波同步時(shí)出現(xiàn)的載波頻偏估計(jì)算法較多,時(shí)域頻偏估計(jì)和糾正的方法有多種,例如:phase lock loop(PLL)法、Fitz算法、Maximum likelihood(ML)算法、Data aided(DA)算法、Difference feedforward estimation(DFE)算法、Decision Directed Methods(DDM)算法以及Automatic frequency control(AFC)法。在DSP中用得較多的是DEF算法,它是利用相鄰兩幀的相位差來(lái)估計(jì)頻偏。 頻域估計(jì)頻偏算法是利用FFT變換,通過(guò)循環(huán)移位實(shí)現(xiàn)頻譜搬移,在頻域作相關(guān)運(yùn)算,或退出頻域后再在時(shí)域作相關(guān)處理,通過(guò)估計(jì)相關(guān)峰最大值所對(duì)應(yīng)的頻偏位置獲得頻偏大小。 在DSP處理時(shí)的搜索階段,可以通過(guò)計(jì)算相隔N幀的相位差來(lái)估計(jì)頻偏。 公式:Δf=(φN+I-φN)/N (7) 這里考慮的頻偏相對(duì)信息速率不大。如果相對(duì)頻偏較大,為了糾正大的頻偏,可以采取步進(jìn)措施。當(dāng)DSP在同步搜索階段檢測(cè)不同信號(hào)時(shí),通過(guò)DDS微調(diào),改變下變頻頻率,從而實(shí)現(xiàn)廣域糾頻偏。
式中T為碼元速率的倒數(shù),Δf為接收端載波相對(duì)于發(fā)送端載波頻率的偏移,φ為接收端相對(duì)于發(fā)送端的未知相偏(由兩二甲基甲酰胺波的相位差及信道時(shí)延造成)。 由上述推導(dǎo)不難發(fā)現(xiàn),由于頻偏(Δf)的存在,它對(duì)相關(guān)峰有一定影響,呈Sa(πΔfT)關(guān)系。在頻偏小時(shí),它對(duì)于求相關(guān)峰的影響可以忽略。 2.2.2 收發(fā)兩端信息流頻率源不一致問(wèn)題分析 如果收發(fā)兩端真正同步,那么發(fā)端的信息流速率應(yīng)與收端解碼速率一致,而一般對(duì)碼片采樣點(diǎn)為一整數(shù),那么此時(shí)收端采樣頻率(fs)應(yīng)與發(fā)端擴(kuò)頻碼速率(RN)的比值為一整數(shù);不妨設(shè)為M,則有: fs=M%26;#215;RN (5) 設(shè)擴(kuò)頻碼長(zhǎng)為L(zhǎng)N,每碼片采樣M,則理論上采樣一條擴(kuò)頻碼的樣點(diǎn)值Ns有: Ns=LN%26;#215;M (6) 從上面推導(dǎo)還不可知載波的頻偏只影響盯關(guān)峰峰值,不影響對(duì)擴(kuò)頻碼采樣獲得的樣點(diǎn)數(shù)。然而,如果收端與發(fā)送之間的信息流頻率不一致,采樣的一條擴(kuò)頻碼的點(diǎn)數(shù)N’s可能不等于Ns;如果采樣速率f’s>M%26;#215;RN,則估計(jì)出的下一幀擴(kuò)頻碼起始位置就比實(shí)際的起始位置要偏后;為了盡可能減少收發(fā)兩端信息流頻偏值,應(yīng)盡可能選用穩(wěn)準(zhǔn)度較高的晶振,盡可能保證傳一幀擴(kuò)頻碼的時(shí)間Ts內(nèi)實(shí)際采樣點(diǎn)與理論采樣點(diǎn)相差很小。然而,在同步搜索階段,由于沒(méi)有任何有用信息,在DSP處理時(shí),運(yùn)算量非常大,要判斷擴(kuò)頻碼的起始位置,同時(shí)估計(jì)系統(tǒng)的載波頻偏,一般不可能實(shí)時(shí)處理完畢,這就需要采取拋幀處理。即在處理當(dāng)前幀時(shí),將隨后的若干幀丟掉,為了準(zhǔn)確估計(jì)所拋幀數(shù),一般利用定時(shí)器的定時(shí)功能丟棄數(shù)據(jù)從而間接實(shí)現(xiàn)準(zhǔn)確拋數(shù)據(jù)幀數(shù)據(jù) 。前提是先假設(shè)收發(fā)數(shù)據(jù)流一致,通過(guò)估計(jì)傳一幀擴(kuò)頻碼所需時(shí)間來(lái)估計(jì)需要拋幀數(shù)據(jù)的時(shí)間。然而,實(shí)際中一般收發(fā)數(shù)據(jù)流不一致,雖然差異較小,但這樣可能因?yàn)槔塾?jì)偏差最后使得起始位置偏離所估計(jì)的位置。這就需要DSP控制DDS來(lái)調(diào)整接收端頻率源,保證收發(fā)兩端頻率源一致。 3 基于DSP的同步算法 3.1 載波頻偏估計(jì)算法 對(duì)于載波同步時(shí)出現(xiàn)的載波頻偏估計(jì)算法較多,時(shí)域頻偏估計(jì)和糾正的方法有多種,例如:phase lock loop(PLL)法、Fitz算法、Maximum likelihood(ML)算法、Data aided(DA)算法、Difference feedforward estimation(DFE)算法、Decision Directed Methods(DDM)算法以及Automatic frequency control(AFC)法。在DSP中用得較多的是DEF算法,它是利用相鄰兩幀的相位差來(lái)估計(jì)頻偏。 頻域估計(jì)頻偏算法是利用FFT變換,通過(guò)循環(huán)移位實(shí)現(xiàn)頻譜搬移,在頻域作相關(guān)運(yùn)算,或退出頻域后再在時(shí)域作相關(guān)處理,通過(guò)估計(jì)相關(guān)峰最大值所對(duì)應(yīng)的頻偏位置獲得頻偏大小。 在DSP處理時(shí)的搜索階段,可以通過(guò)計(jì)算相隔N幀的相位差來(lái)估計(jì)頻偏。 公式:Δf=(φN+I-φN)/N (7) 這里考慮的頻偏相對(duì)信息速率不大。如果相對(duì)頻偏較大,為了糾正大的頻偏,可以采取步進(jìn)措施。當(dāng)DSP在同步搜索階段檢測(cè)不同信號(hào)時(shí),通過(guò)DDS微調(diào),改變下變頻頻率,從而實(shí)現(xiàn)廣域糾頻偏。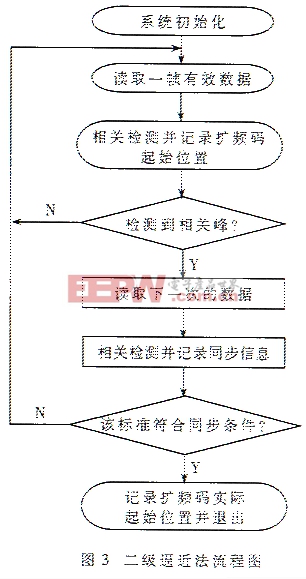 3.2 收發(fā)端信息流不一致解決算法 對(duì)于收端信息流與發(fā)端信息流速率不一致的情況,由上面基于軟件無(wú)線電處理解擴(kuò)分析知道,實(shí)際中一般存在收發(fā)數(shù)據(jù)流不一致,雖然差異較小,但這樣可能因?yàn)槔塾?jì)偏差最后使得起始位置偏離所估計(jì)的位置。因此在運(yùn)算時(shí),為了獲得精確的擴(kuò)頻碼起始位置,需要一定措施;如果直接處理,可以采用多級(jí)逼近法;開(kāi)始時(shí)判決在一定的擴(kuò)頻碼起始位置范圍,接收的數(shù)據(jù)經(jīng)過(guò)相關(guān)處理,是否滿足判決條件;然后基于上一次的同步碼位置,進(jìn)一步壓縮同步碼的起始位置范圍,直到找到同步碼的真正起始位置。對(duì)于本系統(tǒng)采用二級(jí)逼近法實(shí)現(xiàn),流程圖如圖3所法。 但是該算法不夠精練,需要進(jìn)一步改進(jìn),下面提出一種改進(jìn)算法:相對(duì)-實(shí)際兩步法算法。它分兩步進(jìn)行,在檢測(cè)到有效信息時(shí),先利用相對(duì)位置估計(jì)同步碼的起始位置,它的思想是連續(xù)作兩次同步搜索,記錄各自的擴(kuò)頻碼起始位置,然后用后一次的同步起始位置減去前一次的同步起始位置,進(jìn)行模擴(kuò)頻碼碼長(zhǎng)處理。如果獲得的結(jié)果為零,則說(shuō)明收發(fā)兩端整數(shù)流頻率一致;如果不為零,說(shuō)明系統(tǒng)兩端收發(fā)頻率不一致;如果大于零,則說(shuō)明接收方采樣速率慢,需要調(diào)快收端頻率;如果小于零,則說(shuō)明接收方采樣速率快,需要調(diào)慢收端頻率;當(dāng)最終調(diào)整到系統(tǒng)收發(fā)頻率一致時(shí),系統(tǒng)進(jìn)入跟蹤階段,系統(tǒng)在跟蹤階段完成數(shù)據(jù)的解擴(kuò)。由于晶振的飄移特點(diǎn),在跟蹤階段需要進(jìn)行同步跟蹤,但此時(shí)跟蹤范圍縮小,在只需驗(yàn)算擴(kuò)頻碼起始位置及其前后各幾個(gè)點(diǎn),具體視系統(tǒng)要求而定。 采用DSP進(jìn)行解擴(kuò)不同于采用純硬件解擴(kuò),它不但需要考慮載波頻偏的影響,還需要考慮系統(tǒng)同步過(guò)程中估計(jì)的擴(kuò)頻起始位置與實(shí)際的擴(kuò)頻碼起始位置不一致的情況,即同步起始位置飄移問(wèn)題,以及系統(tǒng)同步以后如何保證系統(tǒng)不丟失同步信息。本文就以上兩種情況分別提出相應(yīng)的自滿,以上算法已在某系統(tǒng)中采用,經(jīng)試驗(yàn)證明可以滿足系統(tǒng)要求。
3.2 收發(fā)端信息流不一致解決算法 對(duì)于收端信息流與發(fā)端信息流速率不一致的情況,由上面基于軟件無(wú)線電處理解擴(kuò)分析知道,實(shí)際中一般存在收發(fā)數(shù)據(jù)流不一致,雖然差異較小,但這樣可能因?yàn)槔塾?jì)偏差最后使得起始位置偏離所估計(jì)的位置。因此在運(yùn)算時(shí),為了獲得精確的擴(kuò)頻碼起始位置,需要一定措施;如果直接處理,可以采用多級(jí)逼近法;開(kāi)始時(shí)判決在一定的擴(kuò)頻碼起始位置范圍,接收的數(shù)據(jù)經(jīng)過(guò)相關(guān)處理,是否滿足判決條件;然后基于上一次的同步碼位置,進(jìn)一步壓縮同步碼的起始位置范圍,直到找到同步碼的真正起始位置。對(duì)于本系統(tǒng)采用二級(jí)逼近法實(shí)現(xiàn),流程圖如圖3所法。 但是該算法不夠精練,需要進(jìn)一步改進(jìn),下面提出一種改進(jìn)算法:相對(duì)-實(shí)際兩步法算法。它分兩步進(jìn)行,在檢測(cè)到有效信息時(shí),先利用相對(duì)位置估計(jì)同步碼的起始位置,它的思想是連續(xù)作兩次同步搜索,記錄各自的擴(kuò)頻碼起始位置,然后用后一次的同步起始位置減去前一次的同步起始位置,進(jìn)行模擴(kuò)頻碼碼長(zhǎng)處理。如果獲得的結(jié)果為零,則說(shuō)明收發(fā)兩端整數(shù)流頻率一致;如果不為零,說(shuō)明系統(tǒng)兩端收發(fā)頻率不一致;如果大于零,則說(shuō)明接收方采樣速率慢,需要調(diào)快收端頻率;如果小于零,則說(shuō)明接收方采樣速率快,需要調(diào)慢收端頻率;當(dāng)最終調(diào)整到系統(tǒng)收發(fā)頻率一致時(shí),系統(tǒng)進(jìn)入跟蹤階段,系統(tǒng)在跟蹤階段完成數(shù)據(jù)的解擴(kuò)。由于晶振的飄移特點(diǎn),在跟蹤階段需要進(jìn)行同步跟蹤,但此時(shí)跟蹤范圍縮小,在只需驗(yàn)算擴(kuò)頻碼起始位置及其前后各幾個(gè)點(diǎn),具體視系統(tǒng)要求而定。 采用DSP進(jìn)行解擴(kuò)不同于采用純硬件解擴(kuò),它不但需要考慮載波頻偏的影響,還需要考慮系統(tǒng)同步過(guò)程中估計(jì)的擴(kuò)頻起始位置與實(shí)際的擴(kuò)頻碼起始位置不一致的情況,即同步起始位置飄移問(wèn)題,以及系統(tǒng)同步以后如何保證系統(tǒng)不丟失同步信息。本文就以上兩種情況分別提出相應(yīng)的自滿,以上算法已在某系統(tǒng)中采用,經(jīng)試驗(yàn)證明可以滿足系統(tǒng)要求。








評(píng)論