伺服系統基于工業電子的設計方案匯總,包括具體算法,軟硬件協同

伺服系統又稱隨動系統,是用來精確地跟隨或復現某個過程的反饋控制系統。伺服系統使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統。它的主要任務是按控制命令的要求、對功率進行放大、變換與調控等處理,使驅動裝置輸出的力矩、速度和位置控制非常靈活方便。本文為大家介紹在工業中伺服系統的幾種設計方案,以供參考。
本文引用地址:http://cqxgywz.com/article/267225.htm本文針對機組式印刷機械的同步需求,提出了一種基于CAN現場總線的同步控制解決方案,并得以驗證。
本文介紹了一款高精度的交流伺服定剪系統的設計方案。經驗證,本方案所設計的這套系統,穩定性和精度都較以往有了大大的提高,在減少了損失的同時還滿足了客戶對產品越來越高的要求。
本文介紹了BWS-BBR/BBF型伺服控制器PROFIBUS-DP接口的引入,提高了工業自動化運動控制的水平,使伺服電機在工業控制網絡中的通信與控制更為方便、靈活和可靠,實際情況已證明這種控制方式效果好。
本研究采用DSP的新型開發板ICETEK-F28335-A,配合使用其中的EQEP模塊和光電編碼器設計了測量伺服電機轉速的解決方案,同時利用該開發板上的數模轉換(D/A)模塊,經過電壓轉換放大完成對伺服電機轉速的控制,實現了對穩定平臺伺服電機控制的閉環系統。
本系統以TMS320F2812 DSP為控制器,縮短了信號處理時間且提高電流采樣精度;位置檢測用多摩川的TS5667N120 17位絕對式編碼器以提高了位置檢測精度。系統在數控加工中心的應用中,具有定位無超調、高剛性、高速度穩定性,達到了設計指標,可以滿足微米級加工精度的要求。
本文設計了以高性能TMS-320F2812DSP芯片為核心的無刷直流電機伺服控制系統。采用積分分離的PID控制算法,根據偏差,對不同情況進行不同的PID控制,并對系統的硬件設計以及控制算法進行了研究。試驗結果表明,系統響應快,性能穩定,能較好的滿足伺服系統的控制性能要求。
本文介紹一種方法,介于模擬調速及數字調速二者之間,即采用可編程模擬器件(ispPAC10)實現模擬調速系統,系統的電路參數可以通過軟件進行調整,并且可以對建立的系統模型進行仿真。采用這種方法對原有的直流調速器一種CCD相機的自動變焦系統進行改進,取得了很好的效果。
本文提出一種基于高性能單片機MSP430F149、變頻器、變頻電機組成的數字式變頻伺服系統,并將數字PID算法引入到此系統中,使系統獲得了良好的系統靜、動態性能。

pid控制相關文章:pid控制原理
伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理
調速器相關文章:調速器原理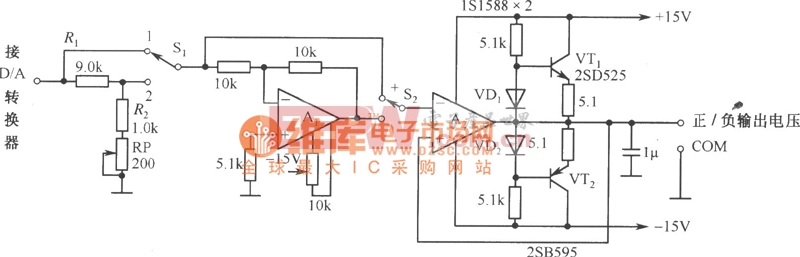

評論