基于NiosⅡ的直流電機PID調速控制系統設計與應用方案

3 實驗與數據分析
本文引用地址:http://cqxgywz.com/article/268260.htm3.1 測試系統
測試系統由一個額定電壓為2.5 V的直流有刷電機和Altera公司的DE2開發板組成。電機相關技術指標為:額定電壓為2.5 V,額定功率為O.065 W,額定轉速為2 150 r/min,空載轉速為2 650 r/min。
整個測試系統的硬件結構圖如圖1中所示,其工作流程在前文中有詳細介紹。
3.2 實驗結果及分析
將直流電機增量式PID算法以C語言的形式寫入NiosⅡIDE中,調試后將其采集到的實測數據導入Matlab,畫出時間與轉速之間的關系圖形如圖7~圖9所示。
(1)比例(P)控制
取采樣周期T=0.1 s,KP=0.5,實驗結果如圖7所示。
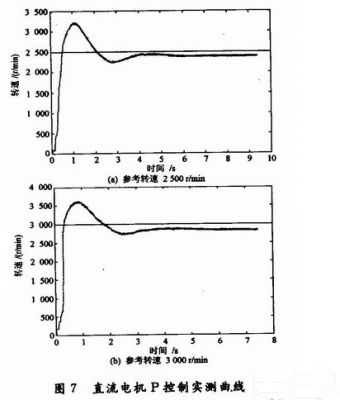
在P控制中,比例環節的作用是對偏差作出快速響應,Kp,越大,控制能力越強,但跟過大的Kp會增大超調量,另外比例環節可以減少穩態誤差,但不能完全消除。從圖7中可以看出比例環節使得電機的轉速從零提升到設定值的過程比較快,但出現了比較明顯的超調,且存在一定的穩態誤差。
(2)比例積分(PI)控制取采樣周期T=O.1 s,Kp=0.5,T1=2,實驗結果如圖8所示。
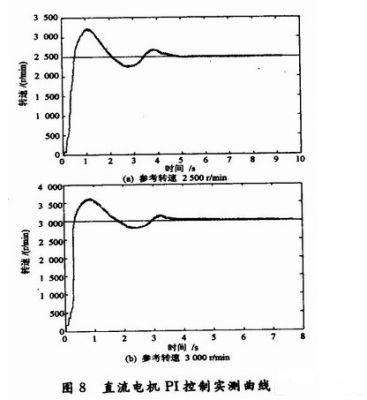
在PI控制中,積分環節的作用的是消除累計下來的偏差(即穩態誤差),在控制過程中,只要有偏差存在,積分環節的輸出就不斷增大,直到偏差為零,輸出才可能穩定在某一值上。但積分環節會降低響應速度,增加超調量,T1越大,積分作用越弱。從圖8中可以看出,在比例環節上加上積分環節,先前的穩態誤差得到消除,電機轉速趨于設定值,但同時也增加了另一段超調量。
(3)比例積分微分(PID)控制取采樣周期T=0.1 s,Kp=0.5,T1=2,TD=0.1,實驗結果如圖9所示。
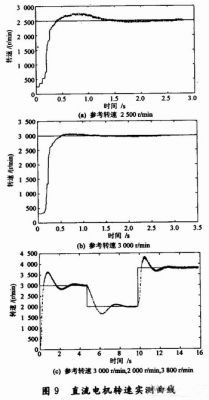
在PID控制中,微分作用是根據偏差的變化趨勢進行控制的,偏差變化得越快,微分環節輸出就越大,并且能在偏差值變大前進行修正。微分環節有利于減小超調量,克服振蕩,TD越大,微分作用越大。從圖9中可以看出,加入微分環節后,超調量明顯得到有效抑制。
從圖7~圖9中可以看出,用PID控制算法控制基于NiosⅡ的直流電機控制效果還是不錯的,有一定的穩定性,即便在轉速出現跳變時,也能進行良好的跟蹤。PID控制算法已經相當成熟,參數可以通過整定很容易得到,實驗表明,此方案具有一定的可行性。
4 結語
提出一種直流電機的新型控制方式,即利用NiosⅡ軟核和FPGA芯片對其控制。通過實驗驗證,將PID增量式算法應用到此系統中,能進行良好的閉環控制。在電機控制中如遇更復雜的電機,如無刷電機等,用NiosⅡ軟核進行控制,可以將其擴展為雙核乃至多核,一個CPU用來控制算法,另一個CPU用來控制外圍系統,互不干擾,發揮NiosⅡ處理器的最大優勢。

pid控制相關文章:pid控制原理
pwm相關文章:pwm是什么
c語言相關文章:c語言教程
pid控制器相關文章:pid控制器原理
鎖相環相關文章:鎖相環原理











評論