采用ATMEGA16單片機設計的兩輪自平衡電動車

2.2車模行走控制方案
本文引用地址:http://cqxgywz.com/article/269736.htm兩輪自平衡車的速度是通過車輪的速度實現的。車輪的速度通過直流電機經過減速箱,增大扭矩。利用直流電機驅動器控制電機的正反轉和PWM調速系統控制兩輪自平衡車的平穩運行。然后通過電機的加速度控制車體的平衡,通過電機的恒定速度和靜止狀態控制車體的勻速運動和靜止狀態。
在運行的過程中當人體的傾角增大時車輪的加速隨之增大以控制車體的平衡,當車體恢復平衡時,以恒定的速度勻速前進。
當轉把轉動時可實現自動復位功能,在轉把的軸徑方向安裝一個大強度的彈簧,使轉把在轉動的過程中自動恢復原位,實現了靈活轉彎的效果,如果轉把的偏向角足夠大可以實現原地轉彎,使兩輪車的運行更加靈活,方便在狹小的地方使用。轉把示意圖如圖4所示。

圖4轉把示意圖
轉把的方向和偏向角是通過高精度電位器檢測的,在轉把的固定軸上安裝個角度傳感器,實現角度的測量。
3程序流程圖
為了便于程序的開發和以后的使用與維護,全部程序采用模塊化結構,即由一個主程序和若干個子程序模塊構成。主程序首先完成初始化工作,包括定時器初始化、LCD16 02液晶模塊初始化、定時器中斷初始化、系統時鐘初始化、其他參數的初始化等。然后啟動定時器進行定時,開中斷允許單片機響應內部中斷請求。定時器中斷流程圖如圖6所示。各程序功能模塊包括LCD1602液晶顯示、電機驅動、動態角度測量、轉向、欠壓報警等。主程序流程圖如圖5所示。

圖5主程序流程圖
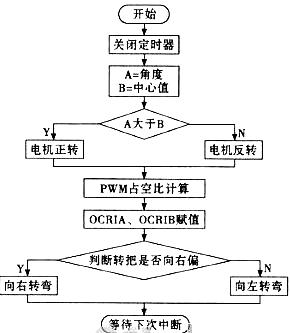
圖6定時器中斷流程圖
整個系統軟件采用模塊化結構。軟件系統包括:主程序負責顯示。車體直立模塊用定時器1中斷完成,每進入一次中斷完成一次PID算法控制車體平衡,在車體保持平衡狀態的情況下通過采集轉把數據實現轉彎功能。
4總結
本系統采用ATMEGA16控制芯片簡化了系統的硬件結構,提高了系統的可靠性和實時性。利用MMA7260和ENC-03MB可以精確地測量出車體的動態角度和角速度,采用大功率MOS管和板橋驅動芯片可以很好地去除MOS管的發熱問題,減少能量的損耗。本電動車采用鋰電池供電既節能又環保,本設計的兩輪自平衡電動車可以在狹小的環境中行走自如,使出行帶來方便。本系統對實際工程應用有一定的指導意義。


評論