智能車運動狀態實時監測系統的設計及實現

系統功能及應用
本文引用地址:http://cqxgywz.com/article/95522.htm本系統主要完成將智能車行駛過程中的各種狀態信息(如傳感器亮滅,車速,舵機轉角,電池電量等)實時地以無線串行通信方式發送至上位機處理,并繪制各部分狀態值關于時間的曲線。有了這些曲線就不難看出智能車在賽道各個位置的狀態,各種控制參數的優劣便一目了然了。尤為重要的是對于電機控制PID參數的選取,通過速度—時間曲線可以很容易發現各套PID參數之間的差異。對于采用CCD傳感器的隊伍來說,該系統便成為了調試者的眼睛,可以見智能車之所見,相信對編寫循線算法有很大幫助。而且還可以對這些數據作進一步處理,例如求取一階導數,以得到更多的信息。
系統的硬、軟件設計及實現
設計方案主要分成三部分:車載數據采集系統,無線數傳系統,上位機數據處理系統。系統基本構建如圖1所示。
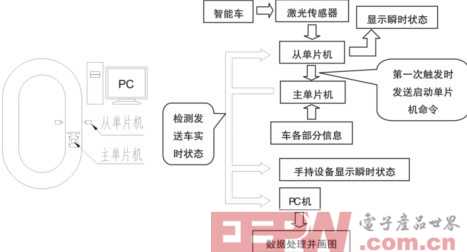
圖1
車載數據采集系統主要由單片機負責采集賽車行駛過程中的速度、傳感器狀態、電池電壓、舵機轉角等信息。為了支持熱插拔,而且不占用S12單片機的內部資源,我們將除供電之外的監測系統與智能車控制系統相分離。我們選擇ATMEL公司的ATMEGA16單片機作為該數據采集系統的處理器。二值型光電傳感器信號的采集直接使用該單片機的I/O口進行采集,連續型光電傳感器、電池電壓及CCD攝像頭信號則采用該單片機的A/D口進行采集,速度信息則通過光電編碼器和該單片機的計數器來采集。采集到的數據每20ms向上位機發送一次。



















評論