基于攝像頭的預測控制策略

(a)
本文引用地址:http://cqxgywz.com/article/95523.htm(b)
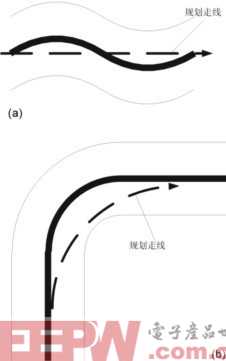
圖1
運動學模型和轉向模型
運動學模型是描述智能小車位置、航向角、前輪轉角之間動態變化關系的模型。轉向模型是描述前輪轉角自身變化時的動態關系的模型。運動學模型和轉向模型可以描述成如下狀態方程的形式:
其中,x、y表示智能小車的位置,ψ表示航向角,δ表示前輪轉角,c=v/L(L為軸間距wheelbase),a=-1/T0(T0為轉向舵機的響應時間常數)。
(a)
本文引用地址:http://cqxgywz.com/article/95523.htm(b)
圖1
運動學模型和轉向模型
運動學模型是描述智能小車位置、航向角、前輪轉角之間動態變化關系的模型。轉向模型是描述前輪轉角自身變化時的動態關系的模型。運動學模型和轉向模型可以描述成如下狀態方程的形式:
其中,x、y表示智能小車的位置,ψ表示航向角,δ表示前輪轉角,c=v/L(L為軸間距wheelbase),a=-1/T0(T0為轉向舵機的響應時間常數)。












評論