- 1 引言
晶體硅太陽電池能夠取得高效轉換效率的原因主要是基于表面鈍化、濕氧氧化等技術的應用。新技術的開發與運用同時也極大地促進了太陽電池的商業化發展。在過去的10年,全球太陽電池的生產以年平均30%的速
- 關鍵字:
均勻 研究 氣氛 擴散 太陽 電池 晶體
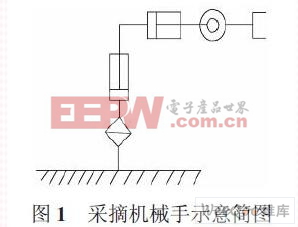
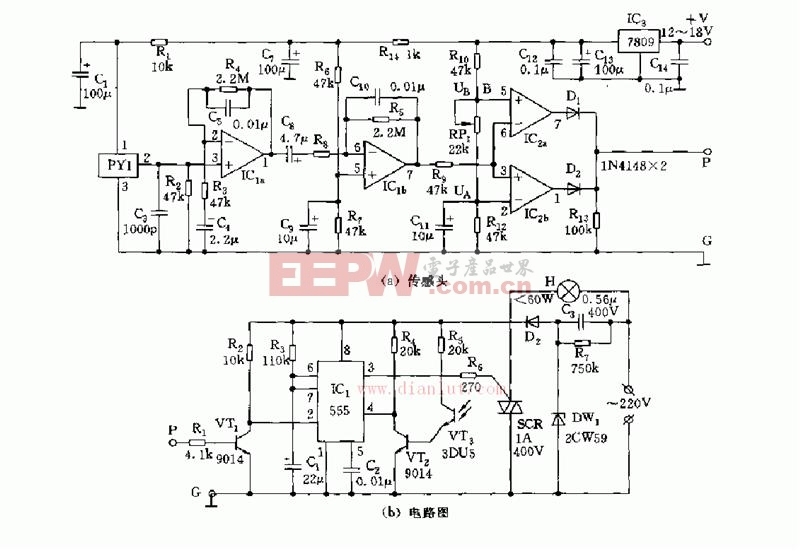
- 基于ARM 的漿果采摘機械手運動控制研究, 隨著計算機和自動控制技術的迅速發展,農業機械將進入高度自動化和智能化時期。漿果采摘機器人的應用可以提高勞動生產率和產品質量,改善勞動條件,解決勞動力不足等問題。漿果采摘機器人主要由機械手及末端執行器
- 關鍵字:
控制 研究 運動 機械手 ARM 采摘 基于 ARM
- 基于ARM的嵌入式服務機器人控制器的研究,1 引言
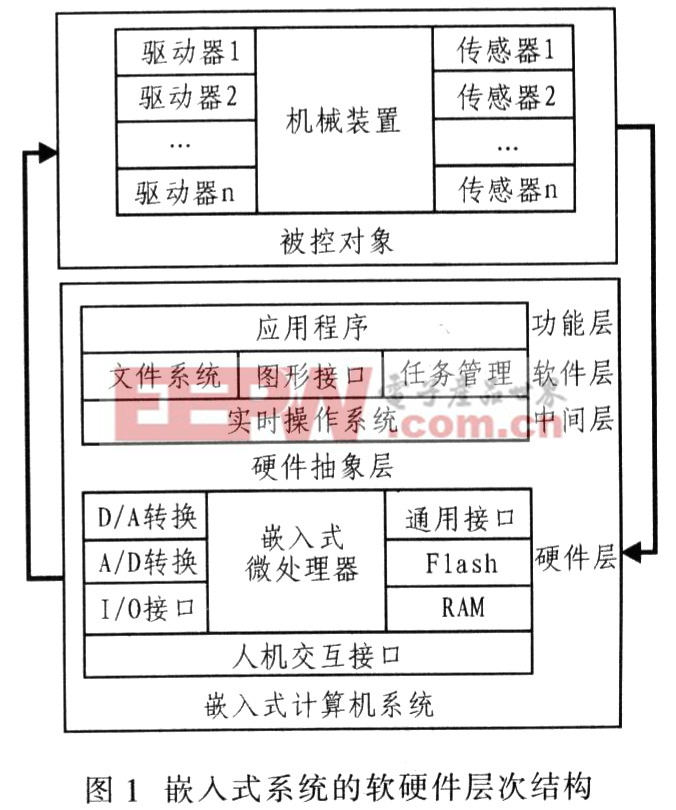
隨著人口老齡化進程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務機器人控制系統設計。該服務機器人的控制系統是機器人的神經中樞,因而其設
- 關鍵字:
控制器 研究 機器人 服務 ARM 嵌入式 基于 ARM
- 0 引言
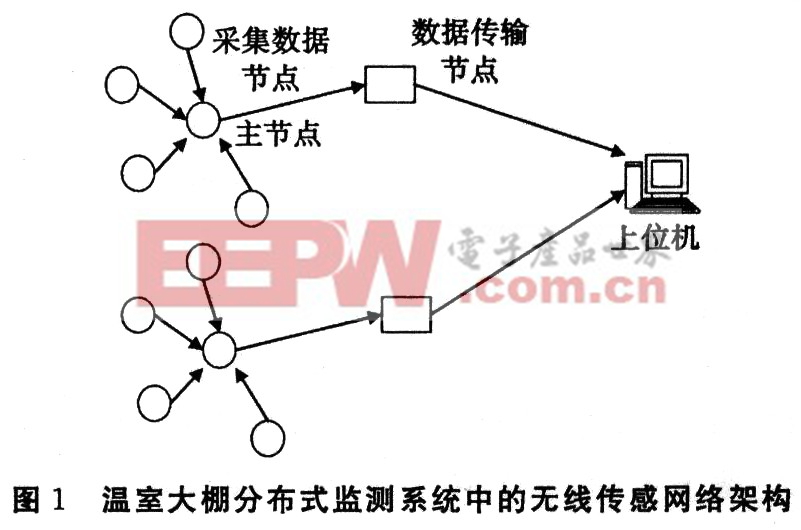
目前我國北方大部分地區都有溫室大棚,而且溫室大棚也隨著自動化監測技術的進步來到了現代化遠程監控的時代,農產品價格的提升使得溫室大棚采用進一步的先進技術成為可能,我們在此背景下將ZigBee技術用
- 關鍵字:
系統 研究 監測 溫度 ZigBee 技術 基于 ZigBee
- 0 引言
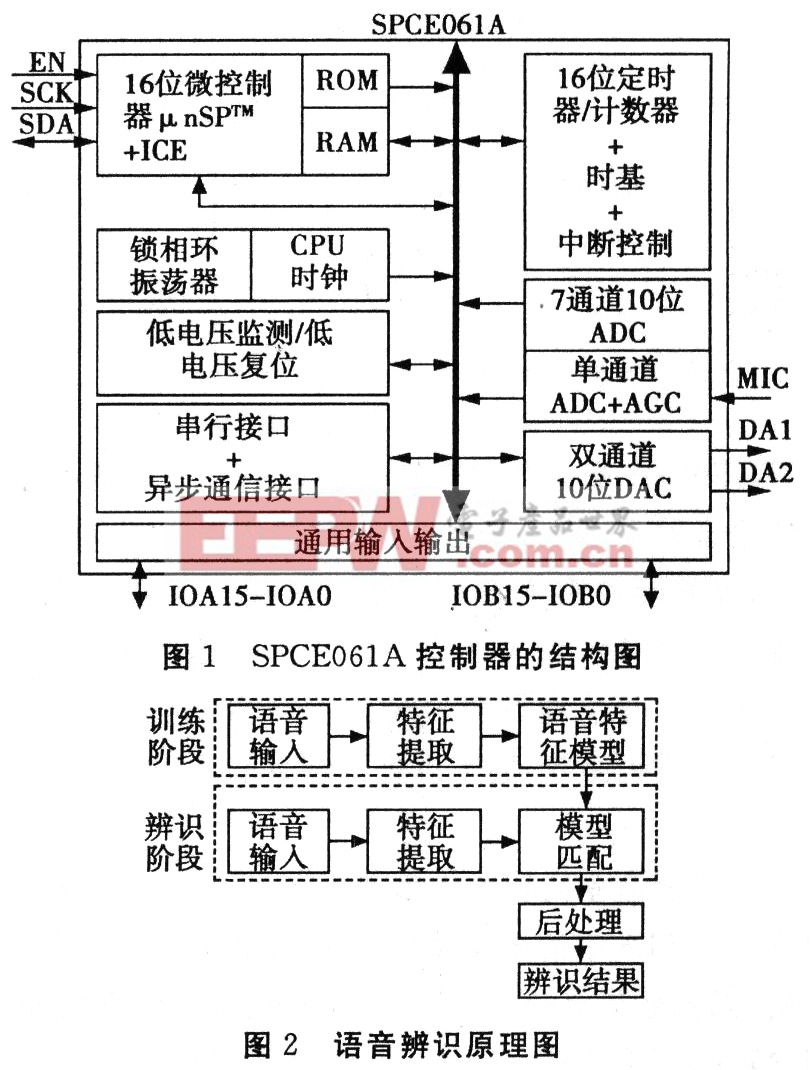
隨著科技的發展,智能設備大量涌現,其中智能汽車作為典型代表之一,對其進行研究開發也相當普遍,當然人與這些智能化設備之間快捷可靠的交互方式很多,其中語音辨識技術以其獨特的趣味性成為了人與智能
- 關鍵字:
辨識 系統 研究 語音 機器人 SPCE061A 智能 小車 基于

- 0 引言
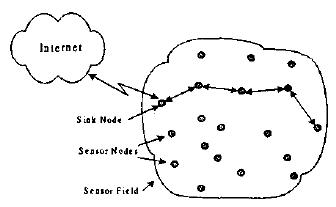
無線傳感器網絡由大量高密度分布的處于被觀測對象內部或周圍的傳感器節點組成、其節點不需要預先安裝或預先決定位置,這樣提高了動態隨機部署于不可達或危險地域的可行性、傳感器網絡具有廣泛的應用前
- 關鍵字:
研究 體系結構 網絡 傳感器 無線 傳感器
- 0 引言
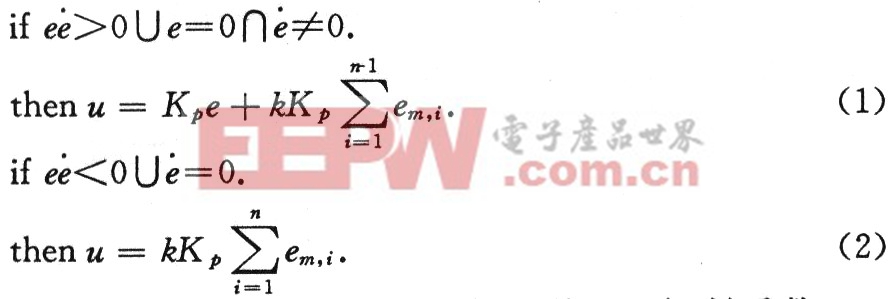
積分作用從某種意義上來說是人的記憶功能的模擬。對人而言,記憶功能具有某種選擇性;在控制中,人總是有選擇地記憶有用的信息而不記憶無用的信息。根據這一發現,周其鑒于1983年提出了著名的仿人智能積
- 關鍵字:
系統 研究 時滯 智能控制 改進 新型
- 0 引言
由于臭氧發生片負載性質呈電容性,雙高變壓器的高壓線圈呈電感性,連接在一起構成諧振回路,諧振回路都有自己固有的諧振頻率,只有在固有的諧振頻率下臭氧發生片才能獲得最大的能量。另高壓線圈存在分布
- 關鍵字:
電源 研究 設計 高壓 高頻 負載 中小 功率 容性
- 0 引言
Mesh網起源于海灣戰爭時期美國的軍事領域,作為一種新型的公共無線城域網解決方案,已經在美國等地被廣泛用于市政、公共安全、教育、醫療、物流等領域。它提供持續的連接,并且當鏈路中斷或者阻塞時可以
- 關鍵字:
相關 研究 MAC 網絡 Mesh 無線 無線

- 0 引言
遺傳算法,主要靠種群基因型的多樣性提供進化機會,產生不斷進化的效果。依據模式理論,遺傳算法的搜索,是對隱含在編碼串內的模式抽樣和編碼串間的模式重構的過程,存在隱含的并行性。本文對遺傳算法操
- 關鍵字:
設計 應用 研究 優化 電路 算法 PFC 控制 遺傳
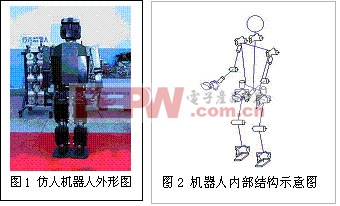
- 提出了一種以CAN總線為通信工具,DSP芯片為控制器的主處理器和雙位置傳感器的反饋結構,其配合主控計算機和底層控制器雙層反饋的控制方式,可適于仿人步行機器人的分布式運動控制系統.整個控制系統結構靈活、功能強大、工作穩定可靠,可以顯著提高仿人機器人的運動性能.
- 關鍵字:
運動 控制系統 研究 機器人 傳感器 CAN 總線 基于 CAN
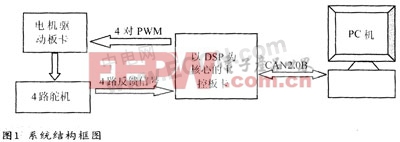
- 本文設計了一種基于CAN通信總線的新型舵機控制器。該控制器考慮了諧波傳動的隨速度波動和低阻尼特點,以提高舵機系統控制品質為目標,采用增量式分段PID算法產生PWH信號,對舵機隨動系統進行實時精準控制,并通過CAN2.0總線接口實現了微型計算機與CPU之間的實時變量傳送,方便了程序的調試。測試結果表明,該控制系統具有抗干擾性能好、控制品質優等特點。
- 關鍵字:
控制器 研究 路舵機 總線 CAN 基于 CAN

- 本文所設計實驗,已經考慮較苛刻的時間及環境閃素,能說明整個系統具有良好的實時性。該實時控制方案的可行,有效降低了雙臂單腿跳躍機器人控制系統的開發難度和成本,是關鍵的階段性成果。
- 關鍵字:
控制 技術 研究 實時 機器人 單腿 跳躍 雙臂 CAN
- 介紹基于STC89C52RC單片機實現非標準交流伺服電機控制的一種方案,提出一種基于控制繼電器的閉合、斷開而達到控制脈寬的大小。通過硬件平臺的搭建和軟件程序,實現閉環控制非標準交流伺服電機滑動磁塊的位移,以此控制磁場變化,達到控制電機轉速的目的。該方案在伺服電機轉速精準的控制中得到了成功的應用,并且控制過程非常平穩,定位精確度很高,滿足了工業現場的需要。
- 關鍵字:
轉速 控制系統 研究 電機 伺服 單片機 交流 基于
研究介紹
您好,目前還沒有人創建詞條研究!
歡迎您創建該詞條,闡述對研究的理解,并與今后在此搜索研究的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473