
- 摘要:針對城市道路交叉口的常發(fā)性交通擁堵現(xiàn)象,依據(jù)RFID檢測系統(tǒng)的特點,提出了一種基于物聯(lián)網(wǎng)前端信息采集技術(shù)的交通流檢測方法。并且對城市道路交叉口采集到的交通流量相對增量、車輛的時間占有率相對增量以及地
- 關(guān)鍵字:
研究 實現(xiàn) 算法 判別 智能交通 擁堵 聯(lián)網(wǎng)
- 摘要:世界能源的短缺以及環(huán)境污染已成為當(dāng)今日益嚴(yán)重的問題,改變能源結(jié)構(gòu),尋找可再生綠色能源愈來愈受到重視。太陽能具有取之不盡、用之不竭、清潔安全等特點,并且太陽能光伏發(fā)電系統(tǒng)的研究對于緩解能源危機,減
- 關(guān)鍵字:
算法 研究 增量 步長電 新型 MPPT
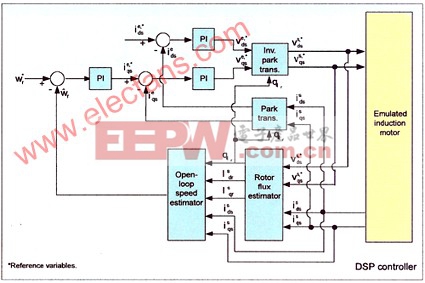
- 數(shù)字控制系統(tǒng)能給設(shè)計人員帶來很多優(yōu)勢,比如它能執(zhí)行高級運算并降低成本。因此,在執(zhí)行數(shù)字馬達控制系統(tǒng)時,數(shù)字處理器的選擇就成為需要考慮的主要問題。
現(xiàn)實世界中的信號在時間上是連續(xù)的,而另一方面,信號
- 關(guān)鍵字:
量化 分析 算法 檢查 控制系統(tǒng) 馬達
- 隨著當(dāng)代通信技術(shù)的發(fā)展,技術(shù)設(shè)備在航空系統(tǒng)、軍隊、工業(yè)等領(lǐng)域的應(yīng)用已成業(yè)務(wù)運行的根本保障,大多數(shù)設(shè)備需24...
- 關(guān)鍵字:
鍵盤掃描 算法 多路斷電
- 摘要:二維離散余弦(DCT)在H.264視頻編碼中承擔(dān)者信號從時域到頻域變換的作用。在現(xiàn)場可編程邏輯門陣列(FPGA)上設(shè)計了高效的采用流水線結(jié)構(gòu)的H.264 DCT硬件電路。首先,把二維4times;4 DCT變換轉(zhuǎn)換成二次一維DCT變
- 關(guān)鍵字:
FPGA 264 DCT 算法

- 具有量子行為的粒子群優(yōu)化算法慣性權(quán)重研究,粒子群優(yōu)化(PSO)算法是一種群智能優(yōu)化算法,最早由Kennedy和Eberhart于1995年共同提出,其基本思想是對鳥群捕食行為的仿生模擬,通過鳥群之間的集體協(xié)作,快速搜尋并找到最優(yōu)解。其基本的進化方程如下:
- 關(guān)鍵字:
慣性 權(quán)重 研究 算法 優(yōu)化 量子 行為 粒子 具有
- 摘要:在此提出基于鍵盤掃描算法的多路斷電預(yù)警系統(tǒng)的設(shè)計,通過設(shè)計相關(guān)的接口電路將斷電信號接入AT89C51單片機,經(jīng)過改進型鍵盤掃描算法檢測后送往PC機監(jiān)控軟件,實現(xiàn)對機房電源的無人遠程監(jiān)控。該系統(tǒng)設(shè)計簡潔,能
- 關(guān)鍵字:
報警系統(tǒng) 設(shè)計 斷電 算法 鍵盤 掃描 基于
- 摘要:傳統(tǒng)的SVPWM算法,因其涉及較多的扇區(qū)判斷、三角函數(shù)計算和平方根運算,其算法較為復(fù)雜。在此首先分析了基于分類算法的SVPWM的基本原理及其在計算效率上的優(yōu)勢。針對雙三相感應(yīng)電機控制的特點,提出基于分類算
- 關(guān)鍵字:
電機 SVPWM 感應(yīng) 三相 分類 算法 基于
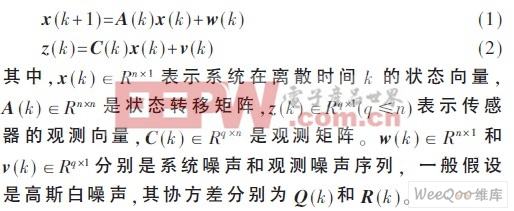
- 采用CarlsON 最優(yōu)數(shù)據(jù)融合準(zhǔn)則, 將基于Kalman 濾波的多傳感器狀態(tài)融合估計方法應(yīng)用到雷達跟蹤系統(tǒng)。仿真實驗表明,多傳感器Kalman 濾波狀態(tài)融合估計誤差小于單傳感器Kalman 濾波得出的狀態(tài)估計誤差,驗證了方法對雷
- 關(guān)鍵字:
估計 算法 介紹 融合 狀態(tài) 卡爾 濾波器 傳感 基于
- 0 引言 輪式小車是智能小車機械結(jié)構(gòu)的主體部分,由車身、輪子、速度傳感器、轉(zhuǎn)動軸等結(jié)構(gòu)部件構(gòu)成。還包括提供動力的驅(qū)動器,采集環(huán)境信息的攝像頭等模塊,綜合實現(xiàn)收集小車的自身狀態(tài)信息或外部環(huán)境信息,并對傳
- 關(guān)鍵字:
小車 方案設(shè)計 智能 算法 PID 控制 采用

- 摘要:設(shè)計了一套以WiFi技術(shù)和RFID定位技術(shù)為基礎(chǔ)的定位系統(tǒng),簡單介紹無線WiFi網(wǎng)絡(luò)的優(yōu)勢及系統(tǒng)的硬件部分。在算法方面詳細描述了LANDMARC算法和三邊定位算法,對兩種算法的優(yōu)缺點進行分析,并結(jié)合兩種算法提出一種
- 關(guān)鍵字:
算法 定位 電子標(biāo)簽 WiFi 基于
- 差錯控制編碼技術(shù)對改善誤碼率、提高通信的可靠性具重要作用。RS碼既可以糾正隨機錯誤,又可以糾正突發(fā)錯誤,具有很強的糾錯能力,在通信系統(tǒng)中應(yīng)用廣泛。由于RS碼的譯碼復(fù)雜度高,數(shù)字運算量大,常見的硬件及軟件譯
- 關(guān)鍵字:
算法 頻譜 結(jié)構(gòu)分析 方案設(shè)計

- 摘要:提出了無線傳感器網(wǎng)絡(luò)中一種基于接收信號指示強度的改進差分修正算法,與傳統(tǒng)的差分修正算法相比,在該算法中,通過各個信標(biāo)節(jié)點分別作為差分參考節(jié)點進行定位,避免了單個差分參考節(jié)點對未知節(jié)點定位決定權(quán)過
- 關(guān)鍵字:
定位 算法 改進 修正 差分 傳感器 網(wǎng)絡(luò) 無線
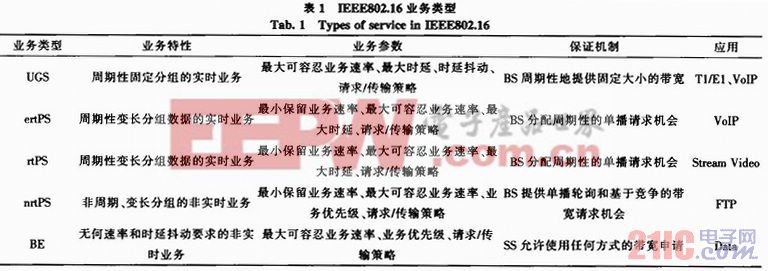
- 摘要:鑒于IEEE802.16標(biāo)準(zhǔn)中未對接納控制機制提出定義,為了提高系統(tǒng)帶寬利用率,在分析現(xiàn)有無線網(wǎng)絡(luò)接納控制技術(shù)的基礎(chǔ)上,結(jié)合IEEE802.16的具體機制提出了一種基于業(yè)務(wù)優(yōu)先級的接納控制算法。相比于先到先服務(wù)的
- 關(guān)鍵字:
控制 算法 研究 接納 系統(tǒng) 優(yōu)先 IEEE802 基于
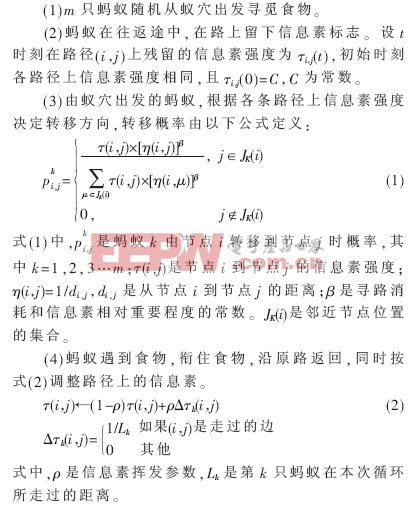
- 隨著無線通信技術(shù)、電子技術(shù)、傳感器技術(shù)和微電系統(tǒng)的飛速發(fā)展,無線傳感器網(wǎng)絡(luò)的研究越來越受到人們的重視。傳感器網(wǎng)絡(luò)是由部署在觀測環(huán)境內(nèi)的大量微型傳感器節(jié)點通過無線通信方式組成的一種無線網(wǎng)絡(luò)。組成傳感器網(wǎng)
- 關(guān)鍵字:
算法 網(wǎng)絡(luò) 路由 傳感器 無線 蟻群 基于
算法介紹
算法(Algorithm)是一系列解決問題的清晰指令,也就是說,能夠?qū)σ欢ㄒ?guī)范的輸入,在有限時間內(nèi)獲得所要求的輸出。如果一個算法有缺陷,或不適合于某個問題,執(zhí)行這個算法將不會解決這個問題。不同的算法可能用不同的時間、空間或效率來完成同樣的任務(wù)。一個算法的優(yōu)劣可以用空間復(fù)雜度與時間復(fù)雜度來衡量。
算法可以理解為有基本運算及規(guī)定的運算順序所構(gòu)成的完整的解題步驟。或者看成按照要求設(shè)計好的有限的確切 [
查看詳細 ]



 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473