運動 文章 最新資訊
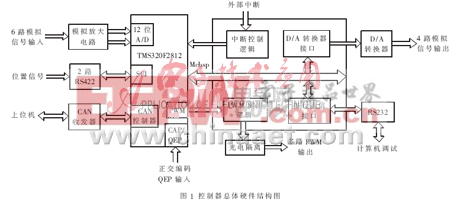
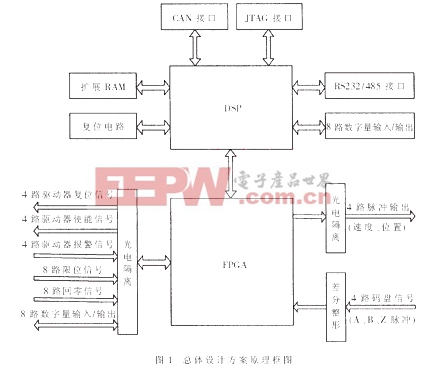
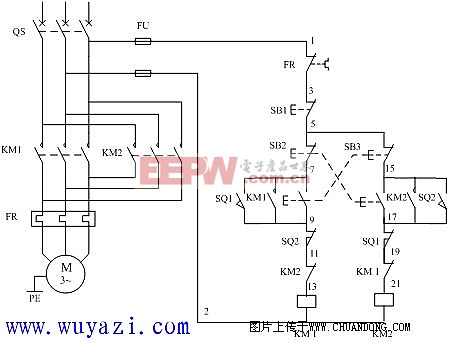
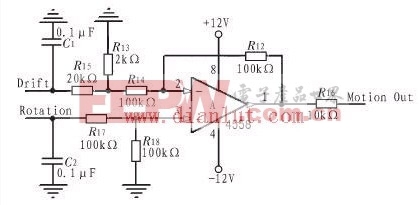
基于DSP的雙足機器人運動控制系統(tǒng)設(shè)計
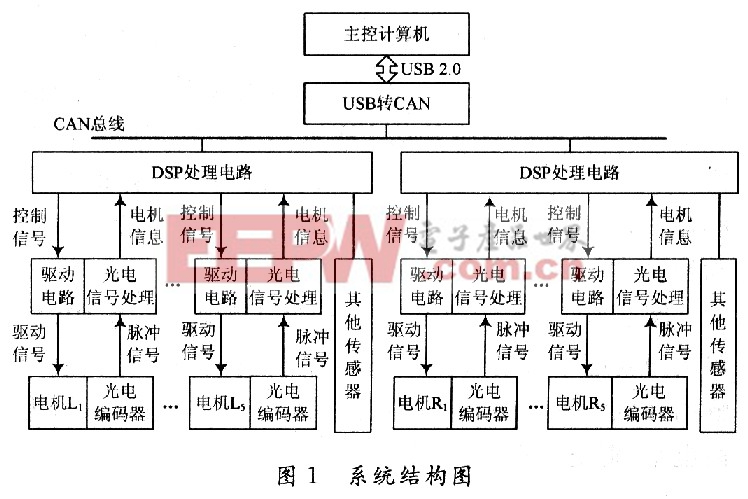
- 在仿人機器人研究領(lǐng)域,雙足步行控制一直是其難點。主要介紹基于TI的DSP芯片TMS320F2812設(shè)計雙足機器人的基本運動控制系統(tǒng),圍繞機器人腿部無刷直流電機的驅(qū)動進行優(yōu)化設(shè)計。系統(tǒng)采用PWM進行電機調(diào)速,輔助以補償參數(shù),通過步態(tài)指令,驗證電機運轉(zhuǎn)的精確性、穩(wěn)定性和系統(tǒng)的可操作性。電機調(diào)試為CCS仿真、步態(tài)規(guī)劃和獨立行走提供試驗平臺,使機器人能夠?qū)崿F(xiàn)步行功能。
- 關(guān)鍵字: 控制系統(tǒng) 設(shè)計 運動 機器人 DSP 雙足 基于 編解碼器

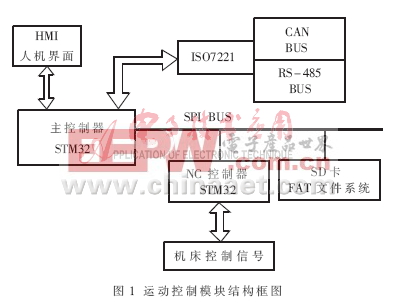
MPC07控制卡在運動控制系統(tǒng)中的應用
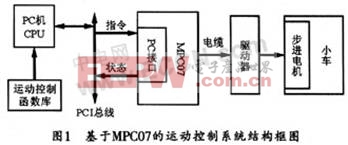
- 本文采用MPC07控制卡來作為運動控制系統(tǒng)的開發(fā)平臺,并利用VC++對MPC07運動函數(shù)庫進行二次開發(fā)來編寫面向?qū)ο蟮目刂瞥绦颍瑥亩ㄟ^MPC07卡來實現(xiàn)對運動控制系統(tǒng)中小車的精確運動控制。MPC07控制卡是基于PC機PCI總線的
- 關(guān)鍵字: 應用 控制系統(tǒng) 運動 控制卡 MPC07
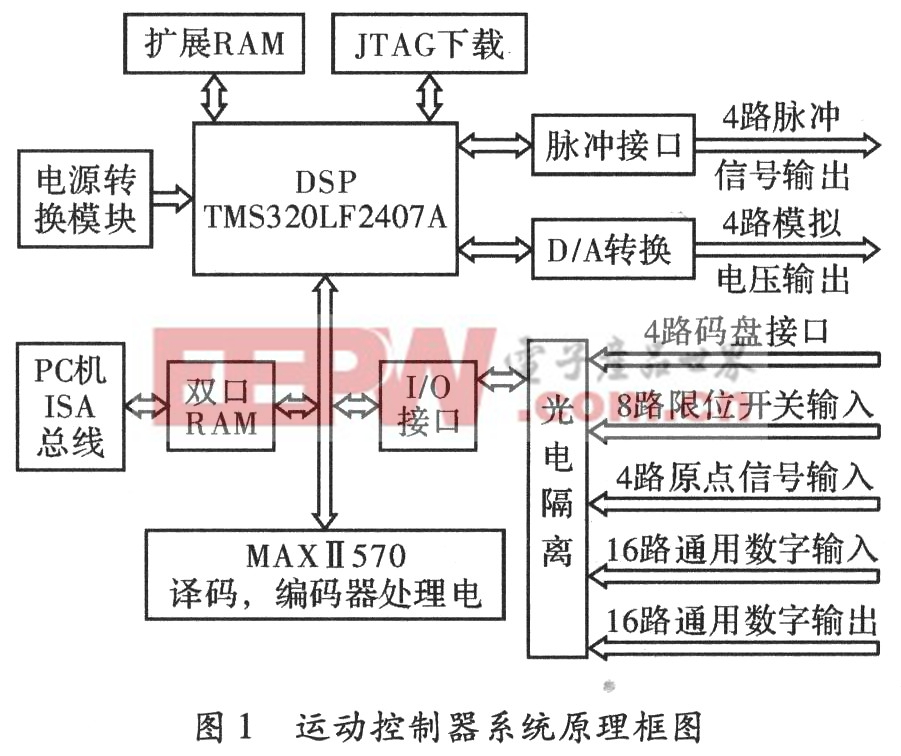
基于DSP的運動控制系統(tǒng)設(shè)計
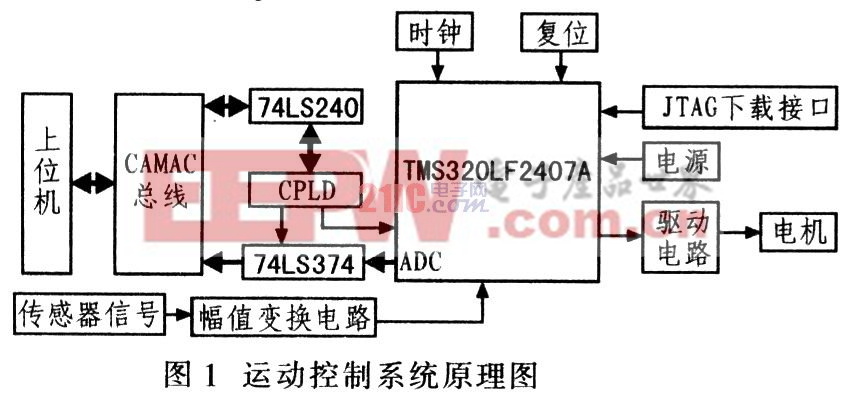
- 基于DSP的運動控制系統(tǒng)設(shè)計,摘要:為了滿足CNC齒輪測量中心的測量精要求,針對定點數(shù)字信號處理器(DSP)TMS320LF2407A的特點,設(shè)計一種以DSP運動控制為核心的運動控制系統(tǒng)。該系統(tǒng)通過DSP內(nèi)部集成的A/D轉(zhuǎn)換模塊對傳感器電壓值進行采樣,由DSP控
- 關(guān)鍵字: 設(shè)計 控制系統(tǒng) 運動 DSP 基于
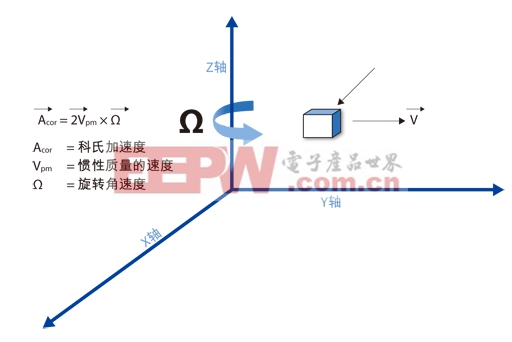
IEEE1588在分散運動控制系統(tǒng)中的應用
- 引言
本文說明IEEE1588在一個分散運動控制系統(tǒng)中的應用,目前的解決方案依靠分散運動部件對時間同步的專門實現(xiàn)。隨著IEEE1588的出現(xiàn),可以開發(fā)一種在標準網(wǎng)絡(luò)(如以太網(wǎng))上使用商用技術(shù)的運動控制解決方案。本文 - 關(guān)鍵字: 應用 控制系統(tǒng) 運動 分散 IEEE1588
運動介紹
您好,目前還沒有人創(chuàng)建詞條運動!
歡迎您創(chuàng)建該詞條,闡述對運動的理解,并與今后在此搜索運動的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對運動的理解,并與今后在此搜索運動的朋友們分享。 創(chuàng)建詞條

運動相關(guān)帖子
運動資料下載


關(guān)于我們 -
廣告服務 -
企業(yè)會員服務 -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司