ni-max 文章 最新資訊
LabVIEW天下會誠邀各路英豪

- 2010年4月——由美國國家儀器有限公司(National Instruments,簡稱NI)與LabVIEW開發(fā)者社區(qū)GSDZone聯(lián)合主辦,測量測試世界,中國工控網(wǎng)等眾多海內(nèi)外知名網(wǎng)站傾情呈獻的“LabVIEW天下會”首屆全球華人LabVIEW開發(fā)者競賽,近日在全球范圍內(nèi)展開。該活動旨在促進廣大LabVIEW愛好者交流開發(fā)經(jīng)驗,切磋編程技術(shù)。 LabVIEW天下會分別設(shè)有開發(fā)組和應(yīng)用組,力求更加全面地體現(xiàn)參賽者LabVIEW掌握水平。開發(fā)組側(cè)重
- 關(guān)鍵字: NI LabVIEW 虛擬儀器
NI發(fā)布相位相干射頻測量解決方案
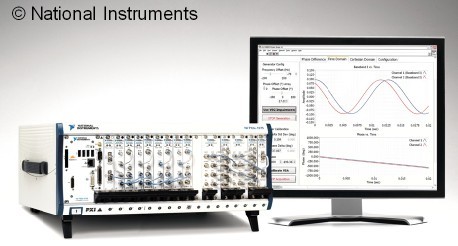
- 美國國家儀器有限公司(National Instruments,簡稱NI)于3月1日推出針對多通道多輸入多輸出(MIMO)射頻設(shè)計和測試應(yīng)用的NI PXIe-5663E 6.6 GHz RF矢量信號發(fā)生器和NI PXIe-5673E 6.6 GHz RF矢量信號分析儀,并有雙通道、三通道和四通道三種版本供選擇。這兩款最新產(chǎn)品基于PXI Express,集成了共享的本地振蕩器(LO),從而實現(xiàn)各RF端口之間的相位相干,使各種射頻測試應(yīng)用的通道間相位測量更加精確。儀器還具有許多其他高級特性,能夠完美用于W
- 關(guān)鍵字: NI 分析儀 PXIe-5663E PXIe-5673E
NI ELVIS在數(shù)字電子技術(shù)實驗中的應(yīng)用
- 摘要:為開拓學(xué)生在專業(yè)領(lǐng)域的創(chuàng)新發(fā)展,將在傳統(tǒng)實驗箱上進行的數(shù)字電子技術(shù)實驗移植到ELVIS平臺。首先介紹了美國國家儀器公司(NI)的虛擬儀器教學(xué)實驗平臺(education laboratory virtual instrumentation suit,ELV
- 關(guān)鍵字: ELVIS NI 數(shù)字電子技術(shù) 實驗
用于機器人的RIO嵌入式控制平臺
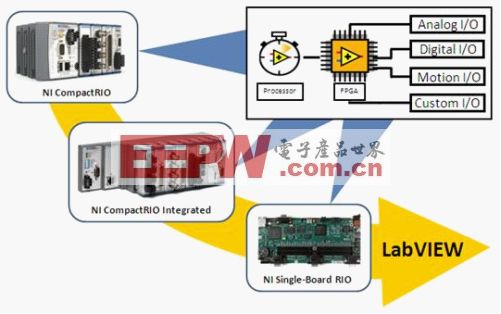
- 概覽 自動或半自動機器人常常需要嵌入式控制系統(tǒng),從而能夠結(jié)合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執(zhí)行器上。NI提供了多種嵌入式硬件平臺,以滿足復(fù)雜系統(tǒng)的需求。從尖端的機器人研究項目直至高級行業(yè)應(yīng)用,NI平臺被證實是高效的機器人解決方案。 可重復(fù)配置I/O(RIO)體系結(jié)構(gòu) NI嵌入式硬件平臺共享通用一個可重復(fù)配置I/O(RIO)體系結(jié)構(gòu)。這個體系結(jié)構(gòu)整合了實時處理器、現(xiàn)場可編程門陣列 (FPGA)和多樣的I/O,包括模擬、數(shù)字、運動和通信I/O。使用這個標(biāo)準(zhǔn)的體
- 關(guān)鍵字: NI RIO CompactRIO
為自適應(yīng)機器人焊接開發(fā)WiseWELDING機器視覺系統(tǒng)

- TIG/GTAW在焊接節(jié)點開始的結(jié)果 作者: Robert Modic, M.Sc. - Wise Technologies Ltd. 行業(yè): Manufacturing, 圖像設(shè)備 產(chǎn)品: NI 9401, LabVIEW, PCI-7811R, cRIO-9151, FPGA模塊, NI 9426, 圖像開發(fā)工具包 挑戰(zhàn): 用自動焊接路徑修正來取代人工操作。這種方案采用優(yōu)質(zhì)不銹鋼加工設(shè)備生產(chǎn),它可以在兩個月的時間內(nèi),完成設(shè)計,原型制造
- 關(guān)鍵字: NI LabVIEW WiseWELDING 機器視覺系統(tǒng)

使用NI視覺硬件和軟件為接線盒零件設(shè)計集成的視覺化和機器人化單元

- 使用NI LabVIEW軟件最大的好處是可以設(shè)計且自定義圖形化用戶界面. 作者: Cristiano Buttinoni, Certified LabVIEW Developer (CLD) - ImagingLab 行業(yè): Manufacturing, 電子 產(chǎn)品: LabVIEW, 機器視覺附件 挑戰(zhàn): 用短批次和多樣化的產(chǎn)品為裝配電子元件設(shè)計一個緊密集成有機器人技術(shù)和視覺技術(shù)的系統(tǒng) 解決方案: 在NI視覺系統(tǒng)的指導(dǎo)下,用
- 關(guān)鍵字: NI LabVIEW 機器人


機器人技術(shù)基礎(chǔ)系列:規(guī)劃與導(dǎo)航
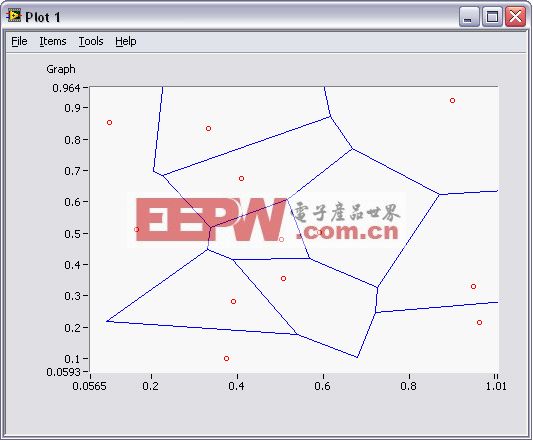
- 概覽 自主移動機器人的規(guī)劃與導(dǎo)航包括利用有目的的抉擇制定和執(zhí)行來使系統(tǒng)實現(xiàn)最高級的目標(biāo)。機器人是否勝任導(dǎo)航的能力必須通過兩個技能來證明:路徑規(guī)劃和避障。 目錄 1. 路徑規(guī)劃 2. 避障 3. 在中LabVIEW使用算法 路徑規(guī)劃 給定地圖和目的地情況下的路徑規(guī)劃指的是機器人通過軌跡識別行進至目的地的能力。路徑規(guī)劃是至關(guān)重要的問題解決能力,因為機器人必須有能力決定在到達目的地前的路程中如何行進。 路徑規(guī)劃可分為兩部分:表達與算法。路徑規(guī)劃人員首先將機器人
- 關(guān)鍵字: NI LabVIEW 機器人
機器人4-1-1:在一個月之內(nèi)實現(xiàn)原型開發(fā)的四個平臺
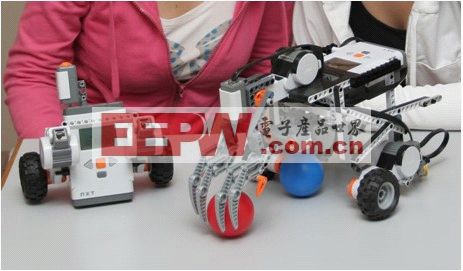
- 目錄 1. 使用LEGO MINDSTORMS NXT進行原型開發(fā) 2. 使用iRobot Create進行原型開發(fā) 3. 使用NI Single-Board RIO和NI CompactRIO進行原型開發(fā) 4. 使用Mobile Robots Inc.進行原型開發(fā) 從工業(yè)自動化機器直至模仿人類行為的類人機器人,都要求使用當(dāng)今最高級的控制系統(tǒng)和復(fù)雜機械結(jié)構(gòu)。機器人 通常部署在動態(tài)環(huán)境中,這使得開發(fā)更具挑戰(zhàn)。即便是最先進的軟件仿真也無法仿真現(xiàn)實環(huán)境中的所有變量。要了解機器人
- 關(guān)鍵字: NI LabVIEW 自動化機器人
LabVIEW機器人模塊——機器人選板中的特殊算法和API
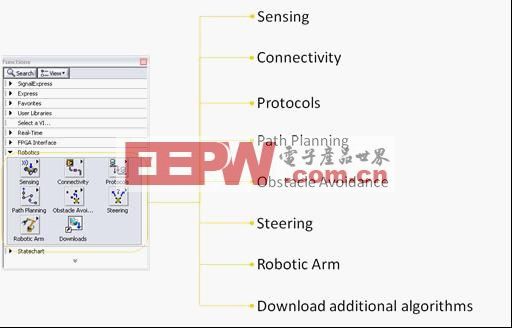
- 概覽 本教程對LabVIEW機器人模塊軟件自帶的機器人算法進行介紹。從傳感器直至路徑規(guī)劃,您都可以使用這個產(chǎn)品來設(shè)計新一代的復(fù)雜的自動化系統(tǒng)。 LabVIEW機器人模塊帶有全新的功能完備的“機器人”選板,其中包含了設(shè)計下一代機器人控制器所需的全新算法。這個全新的函數(shù)選板包含了從傳感器驅(qū)動程序直至反向運動學(xué)的所有功能。詳情請參考LabVIEW幫助(見下面的鏈接),了解關(guān)于機器人VI的更多信息。 · 利用連接VI與其他機器人軟件一起工作,包括例如Co
- 關(guān)鍵字: NI LabVIEW 傳感器
ni-max介紹
您好,目前還沒有人創(chuàng)建詞條ni-max!
歡迎您創(chuàng)建該詞條,闡述對ni-max的理解,并與今后在此搜索ni-max的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對ni-max的理解,并與今后在此搜索ni-max的朋友們分享。 創(chuàng)建詞條
ni-max相關(guān)帖子
ni-max資料下載
ni-max專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司