CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)與磁導(dǎo)航傳感器開展連接及完成配置的實(shí)例
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
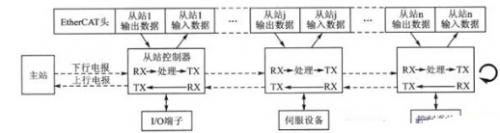
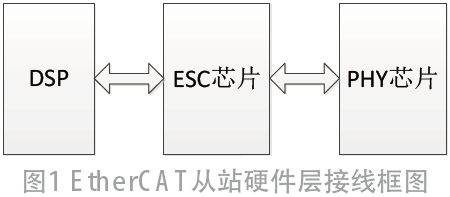
本案例聚焦于國(guó)內(nèi)的自動(dòng)導(dǎo)引車(AGV)制造企業(yè),該企業(yè)需實(shí)現(xiàn)采用CANopen協(xié)議的磁道傳感器與歐姆龍可編程邏輯控制器(PLC)之間的通訊。鑒于此PLC運(yùn)用的是EtherCAT協(xié)議,故而選用了CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)。
具體配置過(guò)程如下:

歐姆龍PLC配置
開啟歐姆龍配置軟件SysmacStudio,雙擊EtherCAT選項(xiàng),于主設(shè)備位置點(diǎn)擊鼠標(biāo)右鍵,選擇顯示ESI庫(kù)功能,在彈出的對(duì)話框內(nèi)選取安裝文件。選定網(wǎng)關(guān)的ESI文件,完成添加操作后選擇Ethercat - PN,對(duì)CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)參數(shù)進(jìn)行設(shè)置,開啟IO映射并對(duì)變量予以設(shè)置,使PLC處于在線狀態(tài),在主站處點(diǎn)擊鼠標(biāo)右鍵,選擇與物理網(wǎng)絡(luò)配置進(jìn)行比較和合并的操作。

網(wǎng)關(guān)配置
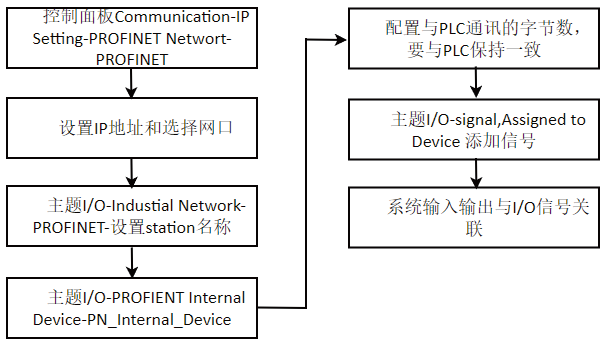
接下來(lái)開展CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)的配置工作。開啟網(wǎng)關(guān)配置軟件“
CANopenConfigurationStudio”,創(chuàng)建新項(xiàng)目并選擇“ECAT - CANopen”,設(shè)定網(wǎng)關(guān)CANopen端的波特率與通訊周期參數(shù),若不采用周期模式,該參數(shù)可設(shè)為0。同時(shí),設(shè)置網(wǎng)關(guān)的字節(jié)順序,下載IP地址,并確定掉線后的數(shù)據(jù)處理方式。

載入從站設(shè)備供應(yīng)商提供的從站伺服電子數(shù)據(jù)單(EDS)文件,待載入操作完成,把從站添加到網(wǎng)關(guān)組態(tài)里。在設(shè)定從站地址時(shí),需事先校驗(yàn)從站實(shí)際地址的精準(zhǔn)性。

對(duì)每個(gè)PDO應(yīng)用的參數(shù)以及PDO的通訊參數(shù)進(jìn)行設(shè)置。若有參數(shù)缺失,可通過(guò)右鍵選擇“添加”功能查找所需參數(shù)。

在確定相關(guān)參數(shù)之后,選擇“自動(dòng)設(shè)置通道偏移”操作,從而達(dá)成與可編程邏輯控制器(PLC)輸入輸出點(diǎn)的精準(zhǔn)對(duì)應(yīng)。對(duì)過(guò)程數(shù)據(jù)對(duì)象(PDO)的通訊參數(shù)(例如傳輸類型、觸發(fā)參數(shù)等)進(jìn)行合理設(shè)置。經(jīng)仔細(xì)確認(rèn)配置無(wú)誤后,將配置數(shù)據(jù)下載至網(wǎng)關(guān),并在PLC一側(cè)開展以太網(wǎng)控制自動(dòng)化技術(shù)(EtherCAT)的設(shè)置工作。

通過(guò)CANopen轉(zhuǎn)EtherCAT網(wǎng)關(guān)網(wǎng)關(guān)的應(yīng)用,磁導(dǎo)航傳感器與歐姆龍PLC的協(xié)同效率實(shí)現(xiàn)質(zhì)的飛躍,為離散制造的智能化升級(jí)提供了標(biāo)準(zhǔn)化解決方案。該方案可復(fù)制至汽車零部件、醫(yī)療器械等對(duì)精度要求嚴(yán)苛的行業(yè),推動(dòng)工業(yè)自動(dòng)化向更高集成度發(fā)展。
*博客內(nèi)容為網(wǎng)友個(gè)人發(fā)布,僅代表博主個(gè)人觀點(diǎn),如有侵權(quán)請(qǐng)聯(lián)系工作人員刪除。