基于RTX51的用戶專用鍵盤軟件設計

#define KEY 2/*任務2:按鍵碼值查詢*/
#define LIGHT 3/*任務3:串口數據處理*/
Init()_task_INIT{
Serial_init();
Os_create task(SCAN);
Os_create_task(KEY);
Os_create_task(LIGHT);
Os_delete-task(INIT);
}
以下對中斷服務程序及各個任務分別予以介紹。
3.2 中斷服務程序
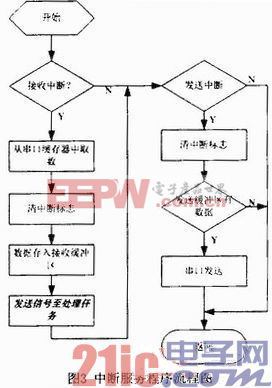
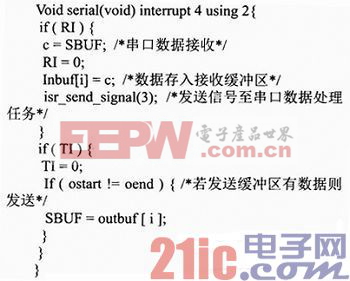
由于中斷可能由發送控制器或接收控制器引起,因此在程序中首先要判斷是接收中斷還是發送中斷,然后分別進行處理。對于接收的數據,程序將其存入接收緩沖區,然后通知串口數據處理任務進行處理。
用戶專用鍵盤數據的發送在中斷服務程序中完成,上一字節的數據發送完畢產生中斷,進入中斷服務程序繼續完成下一字節的發送,而發送緩沖區中的數據由系統在按鍵碼值查詢任務中存入。簡化的中斷服務程序如下:
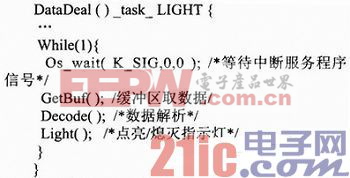
3.3 串口數據處理任務(TASK_LIGHT)
中斷服務程序只處理串口緩存器SBUF的讀取或寫入,數據一旦接收完畢即存入緩沖區,并在專門的任務中進行處理。在多任務系統的用戶專用鍵盤程序中,串口數據處理任務在創建后即被“掛起”,此時該任務處于“等待”狀態,不占用任何時間片,只有當任務接收到“喚起”信號后才繼續執行。本程序中“喚起”信號來自中斷服務程序。由于中斷處理過程可以同RTX51任務互發信號或交換數據,因此,中斷服務程序在接收到數據后立即發送信號量給串口數據處理任務,使后者處于“準備好”狀態,當下一時間片來到時,串口數據處理任務繼續執行,完成數據解析及控制指示燈等操作。由于該任務為循環操作,當所有接收的數據處理完畢后,任務再次進入“等待”狀態,等待下一次串口數據接收后的處理。圖3中,斜體部分即為中斷服務程序發送信號至串口數據處理任務的過程。串口數據處理任務的簡化程序如下:
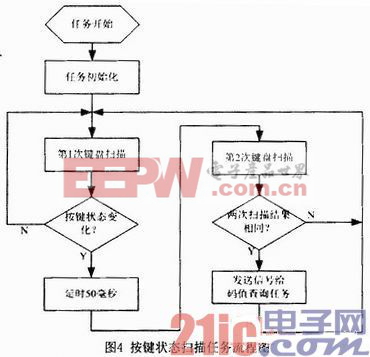
3.4 按鍵狀態掃描任務(TASK SCAN)
按鍵狀態掃描為一個循環執行的任務,程序通過不斷地讀取單片機IO口的值獲取每個按鍵的當前狀態,然后將當前狀態值與存儲在內存中的上一次狀態值進行比較,通過比較結果判斷該按鍵狀態是否發生變化。為消除按鍵按下時抖動造成的多次狀態變化,在掃描到某個按鍵狀態發生改變后,延時一段時間后進行第二次掃描,如果兩次掃描結果相同則認為該按鍵狀態確實發生改變,并轉入下一步處理。按鍵狀態掃描任務流程如圖4所示。
下面給出按鍵狀態掃描任務簡化的源程序:
Scan()_task_SCAN{/*按鍵狀態掃描任務*/
…
While(1){
Key_first_scan();/*第1次掃描*/
If(Keychanged=1){
Os_wait(K_TMO,2,0)/*延時*/
Key_second_scan();/*第2次掃描*/
If(first scan=second scan){/*如果兩次掃描的按鍵狀態一致*/
os_send_signal(2);/*發送信號至按鍵碼值查詢任務+/
}
}
}
}
程序中,采用等待超時信號(K_TMO)來實現兩次掃描間的延時,這樣設計的好處是,在延時期間,由于本任務處于“等待”狀態,系統可以進行任務切換,使其它任務繼續執行,從而在保證系統功能的前提下,提高整個系統的工作效率。需要注意的是,K_TMO是等待產生超時信號,當信號產生后,只是將相應的任務置上“準備好”標志位,任務并不是立即就能夠運行,任務需要等到其它任務輪流執行,到自己的時間片后才會執行。這樣,最后的延時效果是延時時間加上正在運行的任務的執行時間。在用戶專用鍵盤軟件中,同時可能在運行的任務只有“串口數據處理”。由于該任務運行時間與K TMO延時時間比較少很多,因此可以忽略不計,而認為兩次掃描間的延時時間就是K_TMO的時間。假設同時運行的任務較多,并且每個任務占用的時間較長,則延時時間應該取K_TMO加上所有同時運行任務的執行時間之和,即按鍵按下的時間必須不小于此時間,才能保證每次按鍵操作都能正確響應。
3.5 按鍵碼值查詢任務(TASK KEY)
按鍵碼值查詢任務程序流程如圖5所示。
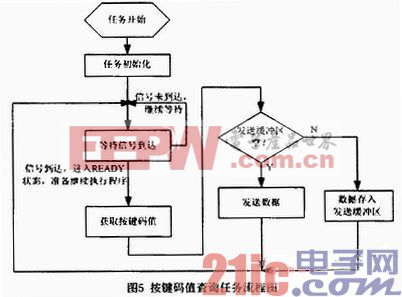
由于發送數據在串口中斷服務程序中完成,因此,在將數據存入發送緩沖區之前必須確認緩沖區中有數據即串口發送中斷會被再次觸發,否則只有將數據寫入串口發送緩存器SBUF直接發送。
下面給出按鍵碼值查詢任務簡化的源程序:
Encode()_task_KEY{
…
While(1){
Os_wait(K_SIG,0,0);/*等待鍵碼查詢信號*/
Keygetcode();/*獲取鍵碼值*/
If(sendempty=1){/*判斷發送緩沖區是否為“空”*/
SBUF=keycode;/*發送緩沖區為”空”,則直接發送*/
}Else{
Outbuf[i++]=keycode;/*否則,將數據存入緩沖區,*/
/*待上一數據發送完后自動發送*/
}
}
}
4 結論
實踐證明,在引入RTX51 Tiny實時操作系統后,軟件開發周期縮短,程序結構更加清晰,系統實時性和并行性大大增強,開發出的程序具有較高的可維護性和可移植性。

DIY機械鍵盤相關社區:機械鍵盤DIY




評論