基于ARM-Linux的電子控制油門設計

摘要:傳統的油門通過右腳進行機械控制,并且剎車也用右腳控制。在緊急情況時,剎車踏在油門的事故時有發生。傳統油門通過機械傳導,結構較為復雜,增加成本。電子油門控制系統通過指令控制執行部分——舵機來控制油門的開度,實現發動機油門開度的精確控制。與此同時,通過節氣門開度傳感器,此設計可以從顯示部分得知油門的實際開度,并有利于新駕駛員駕駛,避免半途熄火的危險駕駛。汽車可按選定的速度穩定行駛,無需駕駛員反復調節節氣門開度。
關鍵詞:油門;S3C2410;Linux設備驅動;舵機;控制;S3003
引言
巡航控制系統(CCS)是20世紀60年代發展起來的,又稱為恒速行駛系統。巡航控制系統工作時,ECU根據各種傳感器輸送來的信號判斷汽車的運行狀況,通過執行元件自動調節節氣門的開度使汽車的行駛速度與設定的車速保持一致。汽車在良好路面上長時間行駛時,駕駛員啟動巡航控制系統并設定行駛速度,不需駕駛員操縱加速踏板,通過巡航控制系統即可自動保持既定的行駛速度,不僅減輕了駕駛員的勞動強度,同時利用先進的電子控制技術控制節氣門的開度,比駕駛員操縱節氣門更精確,汽車燃料經濟性、排放污染性也可得到改善。
1 系統原理
1.1 電控油門原理
工作時,由駕駛員發出轉速的控制指令,由節氣門開度傳感器采集發動機的轉速參數,并把信號輸入電控單元;電控單元將控制信號和反饋的節氣門位置信號進行比較,根據比較的結果來驅動執行器改變節氣門的開度,使實際的開度與控制開度達到一致,從而實現車速的自動控制。
1.2 舵機控制原理
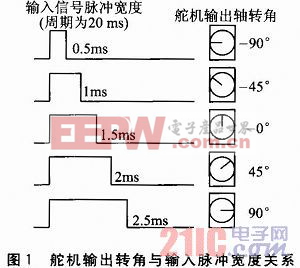
舵機是一種位置(角度)伺服驅動器,適用于那些角度需要不斷變化并可以保持的系統。S3003型舵機有3個引腳,分別為電源Vcc、地GND和控制線Signal。控制信號由Signal通道進入信號調制芯片,獲得直流偏置電壓。它的內部有一個基準電路,產生周期為20 ms、寬度為1.5 ms的基準信號,將獲得的直流偏置電壓與電位器的電壓比較,獲得電壓差輸出。最后,電壓差的正負輸出到電機驅動芯片以決定電機的正反轉。當電機轉速一定時,通過級聯減速齒輪帶動電位器旋轉,使得電壓差為0,電機停止轉動。
控制線的輸入是一個寬度可調的周期性方波脈沖信號,方波脈沖信號的周期為20 ms(即頻率為50 Hz)。當方波的脈沖寬度改變時,舵機的角度發生改變,角度變化與脈沖寬度成正比。其輸出軸轉角與輸入脈沖寬度關系如圖1所示。
2 系統設計
本系統采用三星公司的S3C2410和Futaba公司的S3003型舵機分別作為控制器和執行器,使用Linux操作系統,實驗平臺為濟南恒信有限公司的發動機實驗平臺。











評論