光電通信吊艙內框架懸置系統設計與分析

內框架懸置系統的相關參數可以通過相應的測試和計算獲得。表1為內框架系統的質量及轉動慣量參數,由試驗測得。表2為懸置點相對質心位置坐標,通過數模讀取。表3為隔振器主軸剛度,由試驗測定。本文引用地址:http://cqxgywz.com/article/156373.htm
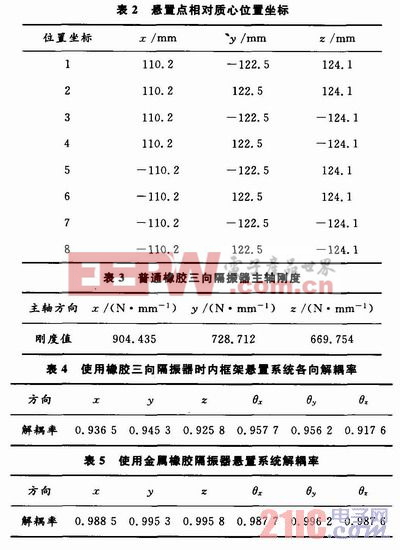
根據前述理論和方法,用Matlab語言編寫出懸置系統固有特性和解耦率的計算程序,再將測試和計算所得的懸置系統參數輸入程序,即可獲得內框架懸置系統的各向解耦率。表4為使用橡膠三向隔振器解耦率數據;表5為使用金屬橡膠隔振器的解耦率數據。
表4數據顯示,所采用的八點對稱布置隔振器的懸置方式在各個方向上的解耦率都很高,基本實現了解耦。由表5可知,使用金屬橡膠隔振器后,懸置系統的解耦率進一步得到提高,顯示了其“無角位移”功能,但是仍然沒有達到100%,其主要原因在于隔振器結構的滑移副接觸面間存在微小的間隙,導致了微小的轉動,這主要受到加工工藝水平的限制。
5 結語
從子系統綜合理論出發,設計了光電吊艙二級隔振模型,對二軸四框架光電吊艙內框架懸置系統進行了分析與設計,對振動耦合情況進行了理論分析和解耦設計,選擇八點對稱的空間支撐系統,設計一種金屬橡膠隔振器,通過限制振動系統的自由度,使懸置系統“強制”解耦,實現了“無角位移”隔振。利用Matlab編程計算驗證了這種懸置方式的合理性與正確性。下一步將考慮斜支撐的懸置型式研究。本文的研究結果為光電吊艙懸置結構設計方面的研究提供了理論基礎。








評論