基于滑模控制的正弦波逆變器控制方案介紹

本文引用地址:http://cqxgywz.com/article/159934.htm
根據變結構系統理論,變換器方程可改寫為:=A′x+B′γ+D(11)
x=y-y*(12)式中x為狀態變量誤差,x=,y*=。代入式(12)得:
iL=x1+iLref(13)
vc=x2+vref(14)
將式(2)代入式(13)并考慮i0=vc/R,得:iL=x1++icref(15)式中icref=C(16)
將式(14),(15)與(16)代入式(9)得:=++γ(17)
對照式(11)可得:A′=B′=(18)D=
改寫式(3)為
s(x)=c1x1+c2x2=cTx(19)式中cT=,x=。
滑模存在的條件是要求所有在滑模面附近的狀態軌跡都指向滑模面。通過滑模控制器產生的信號控制開關管的動作來保證系統的狀態穩定在滑模面附近。因此滑模控制器需滿足式(20):(20)
使開關管變量γ有如式(21)所示關系時,滿足式(20)。γ=(21)
因此式(20)所表示的條件也可改寫為:(22)
在實際應用中,可以認為狀態變量誤差x遠遠小于參考量y*,因此式(22)可變為:(23)
將B′與D代入得:(24)
式(16)代入式(24)得:(25)
當系統穩定時,式(7)等于零,可得電壓誤差的動態特性為:=-(26)在一個穩定的滑模控制中,必須滿足>0。結合式(25),可得:
c1>0,c2>0(27)
設計一個有效的滑模控制器,就必須同時滿足式(25)與式(27)兩個條件。
理論上閉環滑模控制的變換器具有無限高的開關頻率,但在具體實現時是不可能的,因為過高的開關頻率會產生高頻顫動,這種高頻顫動會在系統中形成干擾,使系統不穩,同時高頻顫動也增加了開關損耗。為了回避這種高頻顫動,需要采取相應的開關頻率降低方法,本文采用了延遲方法,即式(21)修改為:γ=(28)
式中σ為控制延遲量,當-σs(x)+σ時,開關狀態保持不變。實際電路中通過一滯環比較器來實現。4仿真與實驗
本變換器的滑模控制器如圖4所示。該控制器的c1=0.3226,c2=0.2036;電流反饋系數k=0.08V/A;選取L=200μH,C=220μF。
圖5~圖7所示為負載R=100Ω時的電路仿真結果。Vin=200V,正弦參考電壓vref=2+sin314t。從
圖8負載突變時輸出電流波形和輸出電壓波形(仿真)
(b)輸出電壓
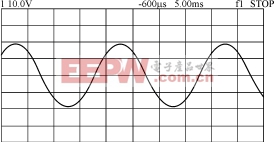
圖9輸出電壓波形(實驗)
(a)輸出電流
圖中波形可知,電壓v1=62+31sin314t,電壓v2=62-31sin314t,變換器的輸出電壓v0=v1-v2=62sin314t。圖8為負載R從空載到R=10Ω時的輸出電壓。從圖中可知,當負載突變時輸出電壓變化很小。
圖9所示為負載R=100Ω,Vin=50V時的實驗結果。
5結論
本文提出了一種新的正弦波逆變器的電路拓撲,闡述了其工作原理,并基于滑模控制原理設計了電路的控制方案。從仿真和實驗結果可知此電路能較好地實現DC/AC變換,系統具有良好的動態和穩態響應。與傳統的全橋SPWM電路相比,能獲得更為理想的正弦輸出電壓。并且由于電感L和電容C是Buck電路的濾波元件,因此可以使用高頻電感以及大的電解電容作為濾波元件,從而可以減小電感值以及電感體積。此外,該電路也能較好地跟蹤非正弦給定信號,因而也可用于信號的功放。本方案的缺點是需采用兩組控制器,控制電路相對較為復雜。







評論