采用68HC908MR16單片機的空間矢量控制變頻電源設計

2.4 串行通信
系統采用串行通信設計了相應的監控系統,使其具有良好的人機界面。其中逆變系統和監控系統均采用MAXIM公司的串行接口芯片MAX3082,通過標準RS-485總線準確實時地實現了相互的串行通信。同時,運用光耦隔離的辦法增強了系統的抗干擾能力,提高了通信的可靠性。雙方約定波特率9600bps,工作于半雙工模式,并采用校驗和的校驗方法檢驗數據通信的準確性。MR16工作頻率設為8MHz,初始化程序如下:
MOV #$50, SCC1 ; 每一幀10位數據, 本文引用地址:http://cqxgywz.com/article/159962.htm
啟動SCI模塊
MOV #$0C, SCC2 ; 發送器和接收器使能
MOV #$00, SCC3 ; 屏蔽出錯中斷
MOV #$30, SCBR ; 設置波特率為9600bps
2.5 軟件設計
系統軟件采用模塊化設計,包括初始化模塊,讀X5043模塊,保護模塊,通信顯示模塊,PI調節模塊,軟啟動模塊以及中斷模塊等。其中除中斷模塊在中斷服務程序中完成以外,其他均放在主程序中完成。主程序流程如圖6所示。
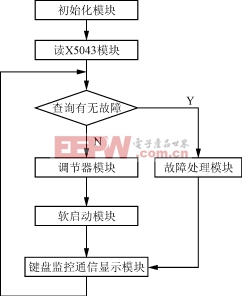
圖6 主程序流程圖
初始化模塊包括MR16內部寄存器初始化,變量存儲單元定義,通信初始化設置等部分;芯片X5043把三種常見的電路,即看門狗電路,電壓監視和EEPROM組合在單個封裝內,它內含的4KbitEEPROM存儲著上次關機時正常運行的參數值設置,每次開機時系統都將這些參數值讀到MR16中,這樣就使系統具有記憶功能,使用戶不必每次開機時都要對系統參數進行重新設置。保護模塊則實現了系統的過熱,過載,過流以及系統低頻保護等保護功能。其中過流保護由硬件完成,以保證系統能在過流產生后的極短時間內迅速封鎖全部的PWM輸出。調節模塊主要完成穩壓輸出的功能,而通信顯示模塊則是方便人機交流的界面,通過它可以進行多種功能的設定,系統狀態的顯示以及各種參數的修改。
3 結語 按照上述思想制成實驗樣機,圖7及圖8分別是變頻器帶載時用示波器觀察到的系統試驗波形。可見,變頻器輸出波形的正弦度良好,符合理論設計的預期要求。 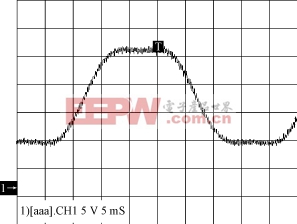 圖7 相電壓波形
圖7 相電壓波形 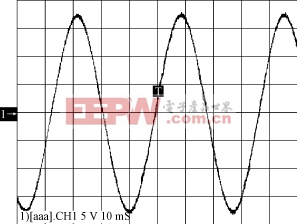
圖8 相電流波形
MR16中頗具特色的部分是專門用于電機控制的PWMMC模塊。該模塊可以產生3對互補的PWM信號或6個獨立的PWM信號,這些PWM信號可以是中心對準方式也可以是邊緣對準方式。6個通道都有一個12位的PWM計時器,PWM分辨率在邊緣對準方式時是一個時鐘周期,而中心對準方式時是兩個時鐘周期,這樣邊緣對準方式的最高分辨率是125ns(內部工作頻率為8MHz)而中心對準方式的最高分辨率為250ns。當PWMMC模塊工作于互補模式時,模塊功能部件自動地將死區時間嵌入到PWM的輸出信號中,并可以根據感應電機的相電流極性輕易地翻轉PWM數據。PWMMC模塊還含有4個故障保護引腳FAULT1~FAULT4,當任意一個故障保護端口為高電平時就封鎖相應的PWM輸出引腳。例如,當系統過流時,就置位FAULT引腳封鎖所有PWM輸出,這樣就封鎖了IGBT的驅動電路,從而實現了過流保護功能。為了避免由干擾引起的誤操作,MR16的每個故障引腳都帶有一個濾波器,并且所有的外部故障引腳都可由軟件配置來再使能PWM,這些都給軟件設計帶來了極大的方便。












評論