基于PXI的電液伺服作動器控制系統的設計與實現

摘要:針對某工程機械中的作動器裝置,利用其液壓系統的工作原理,設計了一種基于PXI的電液伺服作動器控制系統。在介紹作動器液壓回路工作原理的基礎上,簡述了控制系統的設計方案及其組成。該設計解決了該作動器開環控制誤差大的問題,具有控制精度高,靈敏度高,結構緊湊,可復用性高等優點。
關鍵詞:電液伺服閥;伺服系統;作動器;PXI;LabVIEW
0 引言
作動器是一種以液壓油為動力源的擺動機構,在飛行器的升降翼、方向舵、水平襟翼以及坦克、船舶、火車等多種需要擺動機構的場合得到了廣泛的應用。本文的電液伺服作動器是某工程項目中驅動機械裝置動作的傳動設備,該作動器的主要作用是利用作動簡的動作驅動相應裝置產生動作,從而實現對該機械裝置運動軌跡的控制。因此作動器的動作性能指標直接影響到該工程機械裝置的工作安全。
然而,目前大多文獻及研究是以單片機或DSP為控制單元實現對電液伺服作動器的閉環控制,其控制策略復雜,復用性差等缺點使其在工程應用中越來越不能適應實際工況的要求。近幾年,隨著虛擬儀器測試平臺的快速發展,越來越多的工業控制開始利用該平臺進行相關技術的研究與開發。虛擬儀器測試平臺強大的控制、處理能力及標準化、模塊化等優點使其成為當今控制領域的主流控制工具。
本文根據電液伺服作動器的工作原理,結合作動器伺服機構開環的工作特性,提出一種基于虛擬儀器測試平臺PXI架構的電液伺服作動器的控制系統,該系統用于完成對該類作動器伺服機構的閉環控制,實現作動筒及主控閥上位移傳感器所測量的參數可調可顯示,并且為作動器提供二次電源,達到高安全性的控制要求。系統通過作動筒上位移傳感器反饋的參數與操作界面上輸入參數進行比較,產生誤差信號控制伺服閥的開度,使作動筒達到沒定位置,實現機械裝置特定位置的動作,完成控制要求。
1 電液伺服作動器控制系統的組成及工作原理
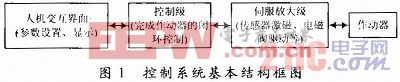
控制系統基本結構由人機交互界面、控制級和伺服放大級組成,如圖1所示。人機交互界面主要是對作動器工作參數進行設置與顯示;控制級為控制系統的核心部分,主要完成對作動器伺服機構的閉環控制;伺服放大級包括傳感器激勵、信號解調、電源輸入及電磁閥驅動等部分。
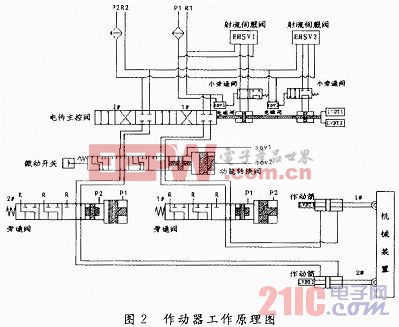
為了更好地說明控制系統的工作機理,下面對作動器伺服機構的工作原理給予簡單介紹。如圖2所示,在正常工作情況下,伺服機構的液壓源正常,電磁閥SOV有電,電液伺服閥EHSV得電,它是通過電流信號控制主控閥的閥芯滑動,進而控制進入作動筒內的油量,使作動簡的活塞桿產生相對位移,從而實現機械裝置的動作。當SOV失電或液壓源出現故障時,相應旁通閥動作,將此油路對應的作動筒兩腔溝通處于旁通狀態。功能轉換閥的閥芯由于SOV失電而產生動作,觸碰微動開關,使其產生動作,該動作經由相關電路調整為電信號,在操作界面上顯示。
由此可見,機械裝置動作是由作動筒的動作驅動,而作動筒的動作是靠液壓油所產生的壓力推動作動筒的活塞實現。若要控制作動筒的活塞運動就必須控制液壓油。在伺服機構工作原理敘述中可以看到,整個作動器的液壓油主要靠電液伺服閥來控制。
電液伺服閥是用于連接系統的電氣與液壓部分,將輸入的小功率電信號轉變為閥的運動,而閥的運動又可以控制液壓油流向液壓執行機構的流量與壓力,實現電液信號的轉換和放大,以及對液壓執行機構的控制。電液伺服閥的工作機理為輸入量是電流,輸出量則是和輸入量成正比的負載壓力或負載流量。











評論