四旋翼飛行器無刷直流電機調速系統的設計

4 無刷直流電機調速系統軟件設計
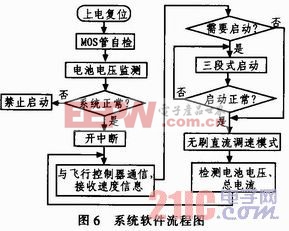
該無刷直流電機調速系統應用于四旋翼飛行器上,電機的轉速與飛行器的升力之間沒有確定的關系,而且受電機參數、螺旋槳結構與尺寸影響很大,因此該電機調速系統對電機調速的精度要求不高。飛行姿態的控制則是通過機載IMU慣性測量單元與該調速系統結合形成負反饋系統完成的,調速系統控制器通過I2C總線與飛行控制器通信,接收PWM占空比信號值。飛行姿態的調整在本文不做研究,因此該調速電路只要實現開環調速即可滿足性能要求。該系統軟件流程圖如圖6所示。
4.1 電機啟動程序設計
該直流無刷電機調速系統的驅動采用軟件啟動方式。直流無刷電機在靜止或者低速運行的時候,非導通相反電動勢為零或者極低,不利于測量,難以實現電機的自啟動。本設計采用三段式啟動方法:首先給AB相通較低電壓較長時間實現電機轉子的預定位,其次根據估測的換相時間換相逐步提高電壓縮短通電時間,最后檢測反電動勢過零點信號是否正常,正常后轉入無刷直流電機運行狀態。期間檢測系統總電流值,若超過20 A則產生中斷信號并關斷所有MOS管,啟動失敗,重新啟動。
4.2 電機調速控制程序
當電機自啟動以后,則進入無刷直流電機無傳感器運行狀態。選擇相應的未導通相,設置模擬比較器相應的輸入通道,打開比較器中斷,進行反電動勢檢測,并且記錄中斷響應時刻,計算相鄰兩次換向時間差,計算換向延遲30°電角度需要的時間,等待換相。電機速度的調整通過PWM信號的占空比來進行調節。
4.3 電機保護程序設計
為了防止電機堵轉、控制信號故障、硬件驅動電路故障引起的電流過大燒毀電機,設計了保護程序。首先系統上電時會檢測系統電池電壓是否在額定范圍內,如果電池電壓低于10 V,則關閉所有MOS管,禁止啟動飛行。若電池電壓正常則進行MOS管短路檢測,首先全部關斷所有MOS管檢測系統漏電流是否在安全范圍內,然后依次導通每個MOS管,關閉其他MOS管,檢測系統電流,如果遠大于系統漏電流則表明有MOS管被擊穿,停止啟動。如果MOS管自檢全部通過則進入正常啟動程序。正常工作中監測系統總電流,若電流超過20 A則進入保護狀態,產生中斷信號并關斷所有MOS管。
5 系統測試
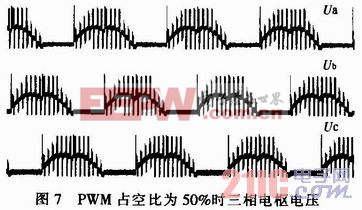
經過調試,此方案下實現的四旋翼飛行器無刷直流電機調速系統能夠滿足要求。用安捷倫6054示波器觀測該電機調速器控制新西達2217無刷直流電機空載運行時的三相繞組相電壓波形,圖7所示PWM占空比為50%時的波形。經測量系統設置電機為最高轉速時系統總電流低于7 A,電機沒有發熱現象。
6 結束語
針對四旋翼飛行器的要求設計了該款基于ATmega8單片機的無刷直流電機調速系統,采用反電動勢過零檢測法實現無傳感器控制,完成了硬件設計與軟件調試,同時設計了電機保護策略,盡可能保證系統的安全。經試驗證明,該系統能夠正常驅動無刷直流電機,為四旋翼飛行器提供動力來源。

比較器相關文章:比較器工作原理











評論