智能跟蹤控制系統的動畫仿真設計

本文針對傳統仿真方法的不足,采用opengl圖形系統結合vc++軟件開發平臺設計出智能跟蹤控制系統三維動畫仿真軟件。在該軟件的設計方案中,提出自動導入的方法使其能直接導入來自各種現場的數據,克服數據來源復雜的難題;提出幾何變換法實現視點調整功能,使仿真過程具有多角度可視性;利用程序的延時技術實現仿真速度的可控性,提高了軟件對仿真對象進行觀察研究的能力。
本文引用地址:http://cqxgywz.com/article/161502.htm2 仿真軟件總體框架
智能跟蹤控制系統三維動畫仿真軟件的基本任務是提供仿真數據的導入功能,智能體軌跡跟蹤過程的精確重演,提供仿真過程的交互功能。通過數據導入功能,不論是來自于實物實驗還是仿真實驗的數據都能較容易地被該仿真軟件使用。仿真運行時要能生成三維動畫圖像,精確模仿智能體軌跡跟蹤過程。仿真過程中要能夠對視點和速度進行調整,以便于從各個方向和不同的距離觀察,以及快放和慢放軌跡跟蹤過程,進一步方便對仿真結果進行分析和處理。
軌跡跟蹤控制系統可能只涉及到一個智能體,也可能涉及到若干個智能體,各個智能體在跟蹤過程中可能組成編隊并擔任著不同的職能,不同類型的智能體以及不同的跟蹤任務其跟蹤控制方法也不同[3]。但跟蹤原理基本一致,即智能體根據預設的或者捕捉到的目標軌跡,經過計算產生控制信號輸入,使其發出跟蹤行動,產生跟蹤軌跡。
為了便于整體開發和擴展應用,根據軌跡跟蹤過程的特點和研究需求,將軟件按照實現的功能進行模塊化設計,并通過操作界面來控制其功能的實現。圖1所示為該仿真軟件的框架結構。

圖1 仿真軟件框架示意圖
該仿真軟件主要設計有導入模塊、重演模塊、控制模塊三大功能模塊,以及提供用戶界面的界面模塊。其中界面模塊用vc++[4]開發,為用戶提供可實現各項功能的操作界面。導入模塊可將復雜數據源的數據導入到指定存儲器中;重演模塊將數據生成軌跡跟蹤過程的三維動畫;控制模塊實現用戶交互功能,可以在仿真過程中通過它調整仿真速度和視點位置。
3 智能跟蹤控制系統建模
根據軌跡跟蹤基本原理建立智能軌跡跟蹤控制系統模型。
設定目標軌跡為:
s0(t)=[s0(t),s0(t),s0(t)]t,
智能跟蹤控制系統為:
(1)其中t為時間參數,x(t)=[x1(t),x2(t),x3(t)]t為系統的狀態向量,u(t)=[u1(t),u2(t),u3(t)]t為系統的輸入向量,f(t)=[f1(t),f2(t),f3(t)]t為系統的控制信號輸入向量,ai,i=1,2,3為系統狀態的常數系數矩陣,bi,i=1,2,3為系統輸入的常數系數矩陣。
設計控制信號輸入f(t)使系統(1)有一個特解為s0(t)這時:
(2)由于系統(1)漸近穩定,因而系統(1)的任意解都趨向于s0(t)。
利用matlabsimulink工具箱[5]可將數學模型轉換為計算機仿真模型。圖2為系統(1)第一個變量的仿真模型。input controller為系統的控制器模塊,其功能是將采集的目標狀態s0通過函數計算得到系統的控制信號f1輸出。
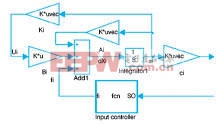
圖2 系統(1)第一個變量的仿真模型








評論