基于D-S證據理論的多傳感器數據融合

然后,得到證據之間的相似程度矩陣SM(矩陣元素為smij)和各證據的支持度Sup(mi),即:
3 算法驗證和結果分析
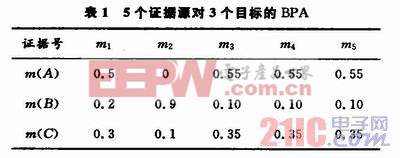
設有5個證據如表1所示。m(A),m(B)和m(C)表示各個證據對識別目標A,B和C的BPA。對于目標A,2號證據對它的指派為0,其他證據對它的指派都較高。尤其是最后3個證據,對它的指派都是一樣的。對于目標B,只有2號證據對它的指派非常高。正常推斷最后結果應該是A。本文引用地址:http://cqxgywz.com/article/161751.htm
使用D-S方法和上述各改進方法對表1數據進行融合的結果見表2。由于2號證據對A目標的BPA為0,無論其他證據對A的支持程度有多高,經典D-S方法的最后融合結果A的概率均為0。僅僅由于證據2對目標B的支持率高,雖然其他證據對它的支持率都不高,最后的融合結果卻是B。這是典型的失效問題。
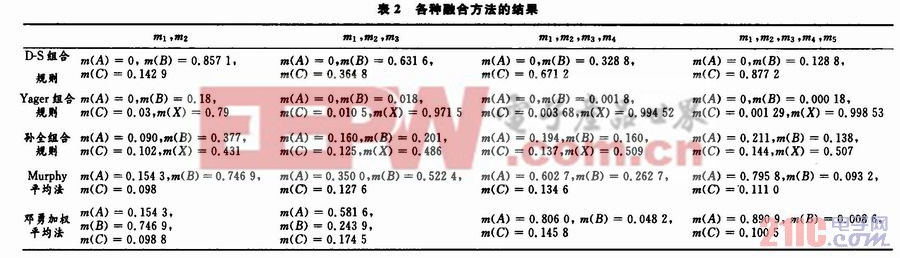
Yager的結果中,不論以后收集多少支持A的證據,未知項m(X)的數值始終在增加。孫全對Yager的改進方法可以部分克服原方法的缺點,表2中可以看出,隨著支持A的證據越來越多,m(A)的數值有所增加,但是增加速度很慢,且未知項m(X)的數值沒有明顯降低,系統無法作出決策。隨著證據的增多,Murphy的平均方法和鄧勇加權方法都能正確的識別出目標A。但是由于Murphy沒有考慮證據之間的相關性,在系統收集到4個證據時,Murphy方法才識別出目標A(對應表中的m1,m2,m3,m4列)。鄧勇加權的方法在收集到第3個證據時就可以正確識別目標(對應表中的m1,m2,m3列)。分析其原因可以發現:由于傳感器本身不可靠或是敵人的干擾或是環境惡劣等因素,導致證據2與實際情況有較大的偏差,Murphy通過將證據進行平均以“抵消”這一“壞值”的影響。但是由于Murphy的方法只是對證據簡單平均,在某些情況下(如本例中m2(B)=0.9,也就是m2強烈支持目標為B,系統需要更多的證據才能有效“抵消”收集的“壞值”。而鄧勇加權方法考慮了證據之間的相互關聯的特性,考慮了各個證據的有效性,有效地降低了“壞值”對最終融合結果的影響,使得在比較少的證據下就能使結果收斂為正確的目標。
4 結語
不確定信息的表示和若干個信息的綜合是不確定性推理的主要問題,D-S證據理論為不確定信息的表示提供了一個很好的框架,其組合規則在大多數情況下是合理的。但是由于人為或自然環境等因素,信息融合系統中收集的證據常常有較大的沖突,這時使用傳統的Dempster組合規則無法有效地處理這些沖突證據。本文總結分析了相關的國內外典型文獻的改進思想,并進行系統條理的分析,為證據理論的發展和改進提供了有價值的參考,并為證據理論在不確定性推理方法奠定了良好的基礎。

傳感器相關文章:傳感器工作原理










評論