數控機床大推力永磁同步直線電機控制方法

3 直線電機的測試實驗
PMAC執行程序Pewin提供了調節PID參數的工具PMAC Tuning Pro,可以方便地調節PID參數。打開Pewin首先調節系統的開環特性,開環特性調節完畢后,調整系統的穩態特性,分別調節PID參數中的比例增益、微分增益、積分增益,使系統階躍響應曲線穩態誤差為0,并且超調量不要過大,得到良好的誤差曲線。最后調節系統的動態特性,以正弦信號為輸入調節系統的跟隨誤差,根據正弦響應曲線調整適當的速度、加速度前饋系數,使系統的跟隨誤差最小,得到較好的動態響應曲線。
經反復調試比較,得到圖7的階躍線響應曲線。從圖中可以看出,系統有較好的階躍響應曲線,證明PMAC卡對直線電機的控制具有良好的效果。本文引用地址:http://cqxgywz.com/article/161818.htm
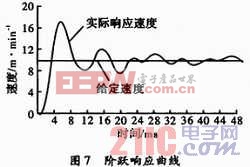
圖8為穩態時給定速度為10 m·min-1時,給定速度與實際速度的比較曲線。
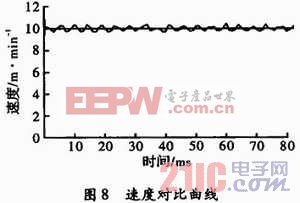
速度波動

速度波動在誤差允許范圍之內。
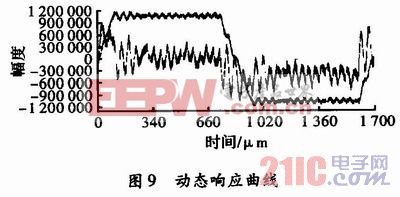
圖9為系統的動態響應曲線,從曲線上可以看出,最大的跟隨誤差為420μm。
4 結束語
依據直線電機的伺服特點,提出了前饋+PID算法的控制策略,運用該控制策略使直線電機具有良好的速度穩定性以及較小的跟隨誤差。伺服算法嵌入到Turbo Pmae Clipper中,利用PMAC Tuming Pro2可以方便地對系統的控制參數進行調節,為以后直線電機朝著高速度、高精度的方向發展提供了支持。

pid控制器相關文章:pid控制器原理






評論