基于Beckhoff嵌入式PC控制器的步進電機群控系統設計

1.2.1 系統硬件配置本文引用地址:http://cqxgywz.com/article/162093.htm
系統硬件配置如下:
(1)CPU(CX1020):內部采用時鐘頻率為1 GHz的奔騰MMX處理器,內存可以擴展到4 GB閃存/1 024 MB RAM,最多可實現255個總線端子連接到CX1020控制器上,再加上Microsoft Windows CE.NET或Microsoft嵌入式Windows XP操作系統便成為功能強大的PLC和運動控制系統,通過網線插在CPU模塊的以太網接口上,可實現與主控制系統的連接。也可通過以太網和計算機連接實現程序的下載和硬件組態。
(2)電機驅動模塊(KL2531/KL2541): KL2531最大驅動電流為1.5 A,KL2541最大驅動電流為5 A。兩者都通過背板總線K-Bus、EtherCAT網絡接口模塊與控制器相連接。可通過程序設定實現步進電機的不同細分,通過K-Bus總線通訊,其配置、診斷和維護非常方便,包括檢測軟件配置錯誤、模塊溫度報警、欠壓及電機A、B相斷路、短路等。實現對電機運行過程中的故障診斷。可提高系統運行的可靠性以及錯誤排查的方便性。
(3)數字量輸入模塊(BL1002/BL1408):BL1002和BL1408分別為2路和8路的數字量輸入模塊,主要用來配合光電開關或微動開關信號的檢測,判斷設備是否已送入指定位置。
(4)終端端子模塊(BK1009):放置在每路模塊的終端,主要起電阻匹配的作用。
(5)EtherCAT網絡模塊(BK1120/EK1110):符合IEC規范——IEC/PAS *07的超高速工業以太網模塊,主要用于控制器的擴展連接。
(6)繼電器模塊(KL2622):主要用于控制系統的通斷電控制,使得系統在工作時加電,停止時斷電,最大限度地減小系統的功率損耗。
(7)電源模塊(CX1100):為CPU及其他模塊提供24 V工作電源。
1.2.2 方案設計
采用1臺CX1020 CPU帶若干個電機控制模塊的控制方案,每個CPU模塊最多可帶255個終端模塊,滿足控制區域內所需最多控制器的需求。為了更加合理化布局,采用BK1120/EK1110模塊將控制系統分為3排,控制器與上層分系統控制臺或總控管理/束組控制臺之間通過工業以太網(Ethernet)相連接,控制系統塊與塊之間則通過超高速工業以太網EtherCAT進行連接,而每一控制模塊內部每個電機驅動端子模塊之間則通過自身背板總線上的K-Bus總線進行連接。由于EtherCAT網絡通信的高速性,保證了從控制臺下達的指令被控制系統接收后,運動控制命令能迅速下達到每個電機驅動模塊,充分確保實時性的要求。電機收到運動指令后,按照要求的方向運行至指定的位置。在指定位置的設備上安裝光電開關或微動開關,信號將導入輸入模塊BL1002/BL1408用以確定最終位置是否準確,以及是否需要修正。
2、 控制系統軟件設計
2.1 系統軟件配置
系統以Beckhoff公司的TwinCAT為軟件開發測試平臺。軟件編程過程分為控制用軟件的編寫過程和硬件組態過程。首先通過PLC CONTROL完成控制程序的編寫,然后再將程序加載到SystemManager中的PLC Configuration,完成程序中的參數和硬件端子的連接,再通過以太網(網絡或者傳輸電纜)與CX1020相連,將硬件組態和控制程序分別下載到目標設備即可完成下位機程序的編寫過程。由于軟件的開放性,在分系統控制臺或總控管理/束組控制臺可通過Visual C++語言或其他高級語言編寫的上位機程序調用TwinCAT中的DLL實現與上位機的控制對接。TwinCAT提供的編程語言包含IEC61131-3的全部語言:IL、FBD、LD、SFC和ST。用戶可以通過選用以上語言的任一種進行PLC編程。此外,用戶還可以通過TwinCAT所提供的運動控制(MC)程序塊進行編程,大大簡化了編程難度,提高了控制的可靠性。TwinCAT也有在運動控制方面的擴展功能,例如,實現控制電子齒輪、飛行前饋、凸輪碟等較為復雜的運動控制系統。本系統主要采用TwinCAT NC進行編程。
2.2 通信及組態連接(編程建立)
本控制方案選用TwinCAT NC軸下的MC(Motion CONTROL)功能塊進行編程。只需要在程序中調用其中的各個功能塊,例如軸使能、運動或者停止模塊,類似調用普通PLC程序*能塊一樣,只需要對相應功能塊的輸入輸出變量進行不同的賦值,便可實現相應的控制。變量可根據其所對應的類型指定地址,也可由程序自動分配其地址空間。
軟件編程結束后,便可進行硬件的組態和連接,其過程如下:
(1)通過網線將控制器與計算機相連接,第1次連接后應進行硬件掃描,確保系統上所有的硬件模塊連接正確。
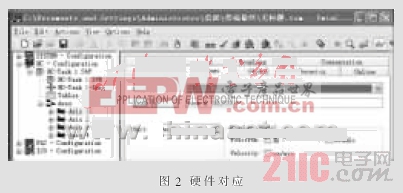
(2)在NC Configuration中添加要控制軸的個數,即所需要控制的電機的數目,然后將所建立的軸與硬件掃描后使該軸的控制器相對應,添加建立所需要的軸和軸與控制器對應后的結果如圖2所示。










評論