模糊PID控制器的設計與仿真研究

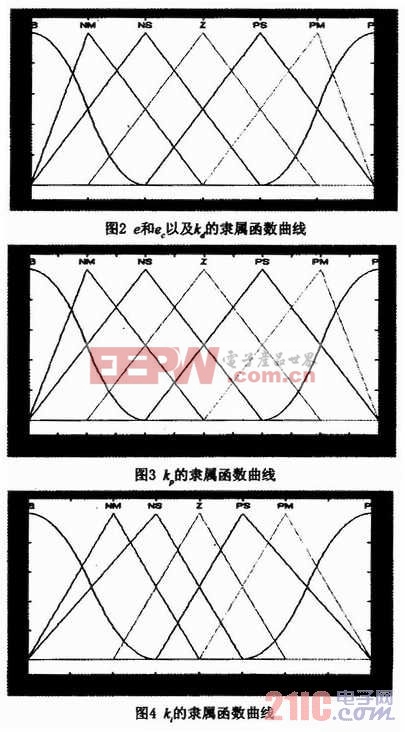
在系統分析的基礎上,將系統偏差e和偏差變化率ec作為模糊控制器的輸入,PID控制器的三個控制參數kp,ki,kd作為輸出。設定輸入變量偏差e和偏差變化率ec語言值的模糊子集為{負大,負中,負小,零,正小,正中,正大},并簡記為{NB,NM,NS,Z,PS,PM,PB}。輸入輸出變量的隸屬度曲線如圖2~圖4所示。偏差e和偏差變化率ec的論域定為[-3,3],輸出參數kp的論域定為[-0.3,0.3],ki的論域定為[-0.08,0.08],kd的論域定為[-3,3],隸屬度函數NB、PB選為高斯函數,其余選為在論域范圍內均勻分布、等距離的三角函數。本文引用地址:http://cqxgywz.com/article/162201.htm

pid控制器相關文章:pid控制器原理








評論