基于TMS320F2812的太陽跟蹤器設計

1.2 太陽位置計算的原理
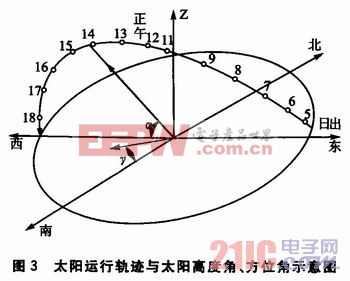
太陽在天球上的位置可由太陽高度角和太陽方位角來確定。地球上觀測點同太陽中心連線與地平面的夾角,稱為太陽高度角;地球上觀測點同太陽中心連線在地平面上的投影與正南方向之間的夾角,稱為太陽方位角。太陽運行軌跡與太陽高度角α、方位角γ的關系如圖3所示。
要計算α和γ,可以采用以下計算方法:
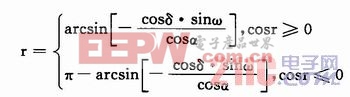
δ為太陽赤位角,ω為太陽時角,φ為當地的緯度。對于δ和ω這兩個參數的精確計算要滿足高精度跟蹤的需求,并根據實際情況來不斷修正;同時,還需要結合傳感器檢測的原理加以修正。采用TMS320F2812做主處理器,根據硬件時鐘提供的日歷時間計算出太陽的高度角和方
位角,進而控制電機轉動方向和角度,由傳動機構帶動支架轉動精確地跟蹤太陽。
2 跟蹤器體系結構設計
根據上述工作原理,本設計以太陽位置計算的方法為主要跟蹤方式,采用硅光電池傳感器進行角度偏差反饋,設計了高精度太陽跟蹤器。
2.1 主要控制電路硬件設計
硬件結構框圖如圖4所示。選用TI公司32位定點數字信號處理器TMS320F2812和Altera公司的CPLDEPM3256為主協處理器。由DSP完成計算與控制算法,并產生用于步進電機控制的SPWM波;輸入/輸出接口采用光電隔離;驅動器電路選擇IPM模塊,可以達到功率驅動的目的,進而驅動高度和方位步進電機運轉。CPLD實現實時顯示、掃描鍵盤、接收擴展中斷等功能。二者通過DSP的外部接口(XINTF)進行通信。采用光電開關和限位開關分別實現定位、限位功能,提高了系統的穩定性和可靠性。采用LCD顯示和5×5矩陣鍵盤,方便進行人機交互的臨時調整操作。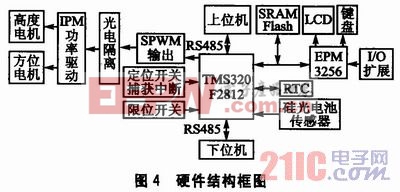
首先利用光電定位開關和硅光電池傳感器進行初始對準,通過TMS320F2812的SPI總線設置硬件時鐘RTC初值后,利用硬件時鐘實時讀取時間并計算太陽高度、方位角。在設定的工作時間內,依據計算的太陽高度、方位角選擇合適的運行時間和運行速度,計算步進電機應該轉的步數和控制板應該發的脈沖數。由 EV事件管理器產生SPWM波,經IPM功率驅動后,驅動高度和方位方向步進電機轉動,經機械傳動帶動太陽能集光器支架轉動適當角度,實現自動跟蹤。每天工作完以后自動返回歸位,若出現較大位置偏差,可以由光電開關和硅光電池傳感器進行修正。修正完畢重新進入自動跟蹤,工作完成后自動返回。








評論