異步電機無速度傳感器矢量控制系統研究

依據波波夫超穩定性理論求解穩態誤差,設計出比例加積分的自適應律為:

式中:ki,kp為可調系數;ω0為給定估算轉速初值,可以任意給定,取ω0=0。至此,構建出基于模型參考自適應方法的轉速辨識模型。
2 仿真模型的建立
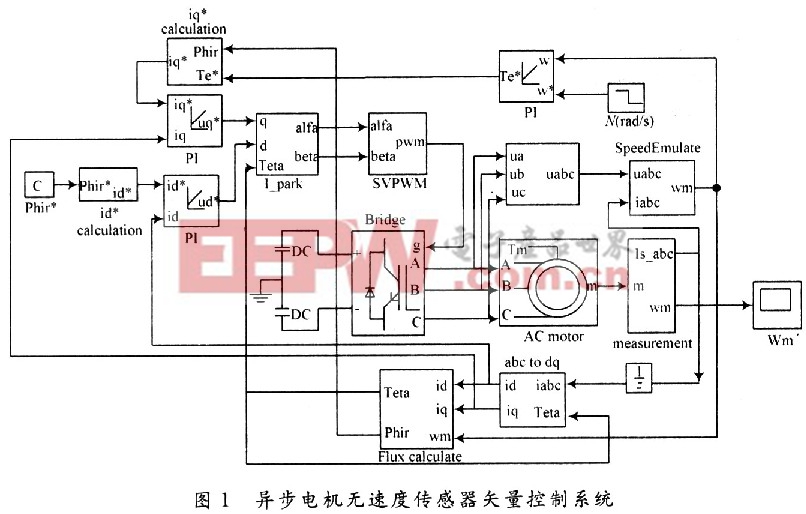
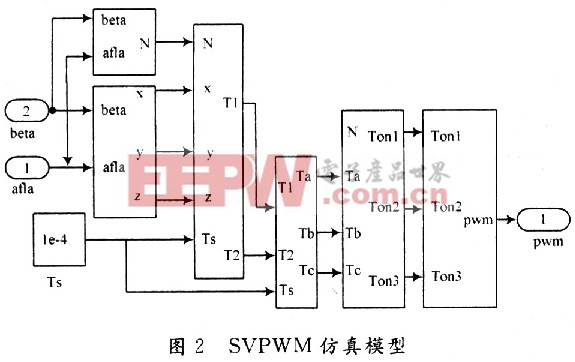
異步電機無速度傳感器矢量控制系統如圖1所示,主要包括三相異步電機模塊,SVPWM模塊,PI模塊,坐標變換模塊,轉子磁鏈估算模塊,轉子轉速估算模塊,逆變器模塊等。該系統主電路采用SVPWM調制逆變器,控制電路中,給定轉速與估算轉速經過速度調節器得到轉矩,與估算磁鏈值計算得到電流isq,經過電流調節器,再經過PARK逆變換得到兩相靜止電壓,經過SVPWM調制,控制逆變器電壓輸出,進而控制三相異步電機。SVPwM控制的基本思想是將電機與逆變器看成一個整體,最終在電機內部形成圓形磁場,以達到更好的控制效果,SVPWM控制的仿真模型如圖2所示。
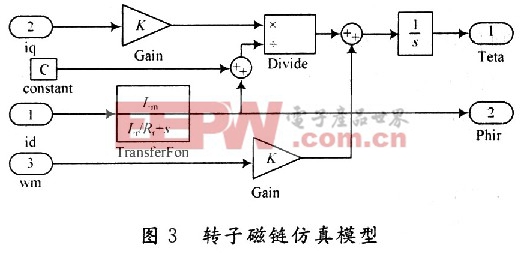
異步電機轉子磁鏈依據式(1)估算,仿真模型如圖3所示。異步電機轉子轉速估算模型如圖4所示,依據轉子磁鏈觀測電壓模型與電流模型,采用MRAS法辨識。在仿真調試過程中,加入一階傳函近似為低通濾波器,對輸出估算轉速進行處理。仿真結果有明顯的改善。












評論