多軸運動控制器在轉臺控制系統中的應用

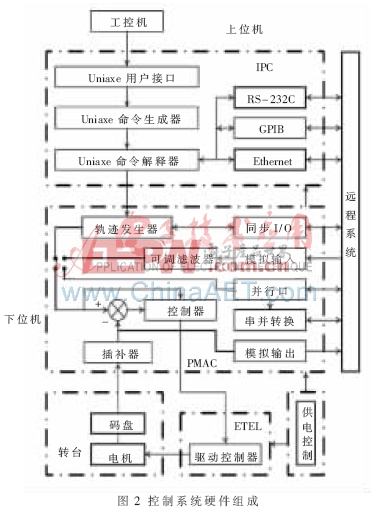
其中上位機主要根據控制規律進行計算、處理、邏輯判斷和存儲,實現轉臺控制的集中監控、綜合管理,主要實現系統實時在線綜合管理、性能檢測、安全保護及監控管理以及數據采集與處理功能。在轉臺系統運行過程中,上位機完成轉臺系統性能參數的圖形顯示、數據處理,得出系統工作所必需的指令和參數。由于工業控制計算機抗震性和抗干擾能力強,工作可靠性高,目前被廣泛用于現場數據采集處理及伺服系統的上位計算機。本系統采用研華工控機作為上位機,集中控制多套伺服系統。
下位機是轉臺控制系統的直接控制級,構成轉臺內、中、外框三個獨立的伺服控制回路。下位機完成伺服控制系統的數據采集與處理、控制律的實施并實現與上位機實時通信。本系統中下位機由PMAC充當,PMAC控制卡通過標準總線與上位機相聯,碼盤等測速或測角機構通過PMAC上的DD接口傳遞位置、速度等信息,經PMAC處理,并按上位機給出的控制要求通過PMAC上的DA接口輸出合適的電平信號控制轉臺上的電機運動,從而構成控制閉環。
另外,PMAC通過總線向上位機交換報告轉臺位置、運行安全等信息,并從上位機獲得程序運行所需要的命令,如程序開始、結束和系統復位等。由于PMAC自身的特性,使諸如碼盤信號換算、行程限位等功能可以很方便地實現,且PMAC的可編程特性使系統具有很強的擴展能力,整個系統構成要比普通的上下位機系統顯得簡單實用。而PMAC的使用也使系統更具通用性,只需作少量調整即可應用于其他設備。
4 運動控制系統軟件設計
本課題中下位機選用PMAC運動控制卡。該運動控制卡是現在使用的比較普遍、可靠性很高的多軸運動控制器,它的核心硬件是DSP與FPGA,提供運動控制、邏輯控制、數據采集、信息處理、同主機交互等強大的資源,其最大的特點是軟硬件的開放性。PMAC可以通過執行軟件(PEWIN)實現各種控制的基本操作及系統調試,從而實現執行運動程序、執行PLC程序、伺服環更新、資源管理等主要功能。
對于轉臺的控制系統,系統功能實現實際由工控機和PMAC卡共同分擔完成,運動控制軟件包括2個部分:工控機主要完成人機界面、系統任務管理、視頻顯示、方位角度計算與發送等功能;MAC卡主要實現所要求的運動控制、I/O管理、PLC等功能。
4.1上位機控制軟件的開發
對于轉臺控制系統上位機的工控機,基于WindowsXP操作系統,利用VisualC++6.0開發系統開發了轉臺運動控制系統軟件,具有視頻顯示、轉臺控制方式選擇、轉臺運動狀態顯示、GPS信號顯示、異常報警等功能,利用下位機封裝好的各類運動控制函數和參數設置功能函數,在上位機軟件開發時實現“下位機透明”式的開發,使上位機界面開發以及和其他功能集成時無須關注運動控制層的細節,從而更著重于其他方面功能的實現。
4.2下位機控制軟件的開發
下位機控制系統中PMAC卡上集成了豐富的運動控制指令和算法,為轉臺的運動控制提供了方便,對于轉臺控制下位機軟件的開發,充分利用PMAC卡的開放性,主要包括位置伺服模塊、PLC監控模塊等,位置伺服模塊可通過設置PMAC卡內部PID參數實現,PLC監控模塊用于實時提取轉臺運行狀態信號,包括當前的運行方位、運行速度及是否都達到位置限位等,主要包括PMAC的設置和PMAC運動程序的編寫。
4.3 工控機與PMAC卡的通信軟件
外部信號通過計算機串口送入工控機,轉換成方位角度后送入PMAC卡,轉臺的運動方位信息實時通過工控機進行顯示,同時,各種控制指令也是通過工控機傳給PMAC卡,從而實現各種控制目的,本系統利用PMAC卡提供的PCOMM32通信套件,采用動態鏈接庫方式,便于上下位機軟件的模塊化和封裝并使得上位機編程環境的選擇更加自由。
本課題以PMAC卡為核心對三軸轉臺的硬件及軟件進行了設計,通過PMAC構建轉臺控制系統,具有實時能力強、系統穩定、易操作等優點。將PMAC作為轉臺的控制器在理論和實際上都是可行的,使系統設計和應用程序的設計大大簡化,設計者只需要較少的代碼就可以達到目的。另外,當整個系統投入使用并進入維護階段,采用PMAC這樣的標準部件也減少了軟/硬件維護的困難,作為三軸轉臺的改造設計是一個非常好的方法。

伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理
汽車防盜機相關文章:汽車防盜機原理









評論