聲傳感器網絡節點的硬件系統設計

2.4 GPS與北斗模塊
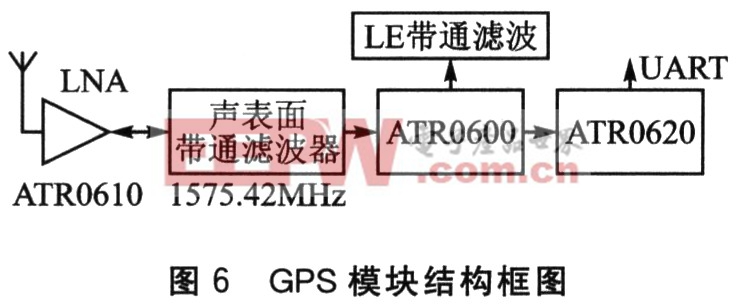
由于各個節點需要獲取自身的位置和精確的時間,因此每個節點需安裝GPS或者北斗模塊。可采用Atmel公司提供的GPS模塊,采用的是串行輸出,只要2 個串行信號線就可以完成較精確的差分衛星定位。GPS模塊的支持電壓為2.7~3.3 V,功率小于100 mW/H。GPS模塊由變頻器模塊(ATR0600)、信號相關模塊(ATR0610)、微處理器模塊(ATR0620)組成。圖6為GPS模塊結構框圖。
2.5 電源模塊
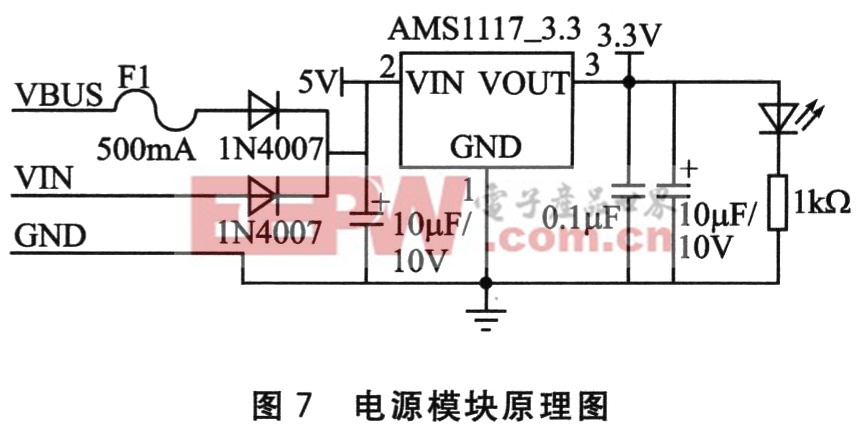
電源模塊的功能是提供節點工作所需的能量,本節點可通過4節干電池或USB端口供電。由于4節干電池和USB端口提供的電壓都是大于處理器模塊、 CC1100和聲音采集模塊所需的3.3 V電源,所以必須將輸入電壓調整至節點所需的電壓。此電源模塊設計采用的是AMS1117_3.3電壓調節器,它的作用是把4節干電池和USB端口提供的 5 V電壓調節到所需的3.3 V。其電路設計如圖7所示。
3 實驗結果
節點硬件系統上移植了TinyOS操作系統,基于操作系統進行各個模塊的消息驅動程序開發,最后進行路由算法的移植。使用2個節點(1個終端節點和1個匯聚節點)進行組網實驗,測試節點對鼓掌聲音信號的靈敏度。采集的聲音波形如圖8所示。

結 語
由于采用了模塊化的設計方法,本文設計的聲傳感器網絡節點硬件系統有助于擴展不同類型的傳感器;此外,該系統還具有成本低、體積小、功耗低等特點,非常適應未來多樣化環境監測任務的需要。











評論