吸塵機器人控制系統設計

引 言
隨著人口的老齡化和社會福利制度的完善,導致勞動力成本的急劇上升,一些簡單的重復性的體力勞動為服務機器人提供了廣闊的市場。清潔機器人是服務機器人的一種,可以代替人進行清掃房間、車間、墻壁等。提出一種應用于室內的移動清潔機器人的設計方案。其具有實用價值。室內清潔機器人的主要任務是能夠代替人進行清掃工作,因此需要有一定的智能。清潔機器人應該具備以下能力:能夠自我導航,檢測出墻壁,房間內的障礙物并且能夠避開;能夠走遍房間的大部分空間,可以檢測出電池的電量并且能夠自主返回充電,同時要求外形比較緊湊,運行穩定,噪音小;要具有人性化的接口,便于操作和控制。結合清潔機器人主要功能探討其控制系統的硬件設計。
1 測控系統及功能
為了使吸塵機器人運動更加流暢,防止出現卡死的現象,把吸塵機器人外觀設計成扁圓柱形的,扁圓形的設計可以使其自由進入沙發、床和家具底下,把一些邊角都能夠清掃干凈。與地面平行的圓形底盤由三個輪子共同支撐,左右兩側的為驅動輪,分別由兩個微型直流電機直接驅動,前面的支撐輪為萬向輪。機器人的這種外形和車輪布局可使其方便地實現原地轉彎,大大提高了行走的靈巧性,這在空間范圍較小的地方更為突出。采用碰撞、超聲波和紅外傳感器組成多傳感器系統,在機器人的上方裝有紅外接收裝置;在機器人的底部邊緣.每隔45°裝有接近傳感器,用來檢測臺階,防止跌落;在機器人的前方裝有碰撞傳感器,前方和左右裝有超聲波傳感器,用來檢測周圍環境。機器人上裝有電源管理系統,如果電壓過低會停止清掃,并且去自動充電。
1.1 微控制器
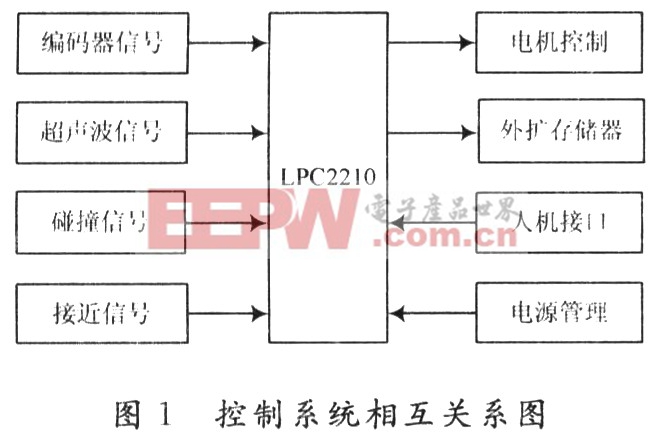
傳統的微處理器如51系列雖然開發周期短,成本低,但其實時性不好,難以實現復雜的控制算法;另外,增加的外圍電路數據轉換速度慢,使機器人的性能得不到充分的發揮。高速DSP的出現雖然使得系統模塊化和全數字化,但其開發成本高。與DSP具有同等性能的ARM微處理器資源豐富,具有很好的通用性,其主要技術優點是高性能,低價格,低功耗,廣泛地應用于各個領域,因此將ARM應用于機器人控制系統不失為一種好的策略。LPC2210是飛利浦帶有一個支持實時仿真和跟蹤的ARM7TDMI-S微處理器,其采用3級流水線技術,能夠并行處理指令。由于具有非常小的尺寸和極低的功耗,多個32位定時器、PWM輸出和32個GPIO使它特別適用于工業控制和小型機器人系統,滿足了機器人對控制器運算速度的要求。以LPC2210為核心。設計結構簡單,性能穩定的清潔機器人車體系統。
機器人控制系統主要完成的任務:接收傳感器和編碼器傳來的數據,綜合處理進行清掃路徑規劃;驅動左右輪前進行走,控制清掃、吸塵機構,完成各種底層控制動作;設計合適的人機接口,在LCD上顯示機器人狀態和運行時間。因此,機器人控制系統包括傳感器模塊,電機驅動模
|
相關推薦技術專區 |











評論